1. MMA7660芯片介绍
MMA7660FC 是 ± 1.5 克的三轴数字输出,超低功率,紧凑型电容微电机三轴加速度计,功耗很低,容量小 MEMS 的传感器。偏移和增益误差补偿采用低通滤波器, 以及用户可配置的转换 6 位分辨率,用户可配置输出速率等功能。MMA7660芯片可以中断引脚(INT)通知传感器数据变化、方向、姿态识别等信息。模拟工作电压范围为 2.4V 至 3.6V,数字工作电压范围为 1.71V 到 3.6V 。常用于手机、手持电脑、车载导航、便携式电脑防盗、自动自行车刹车灯、运动检测手镯、数码机、自动唤醒闹钟等。
特别是步骤计算的功能现在是最常见的,智能手镯和手机都有三轴加速度计,可以记录每天的步数,计算运动量等。现在很多不倒翁、无人机、相机云台,很多常见的产品都能看到三轴加速度计。
通过MMA7660可以做很多项目: 比如: 老年人防摔手环、自行车自动刹车灯、智能闹钟、烤箱自动断电、运动手环等。
这篇文章就介绍如何在Linux下编写MMA由7660三轴加速芯片驱动,读取当前芯片的方向和姿态,获得X,Y,Z三轴数据。MMA7660是IIC当前驱动器采用标准接口IIC使用字符设备框架将获得的数据传输到应用层的子系统编写驱动器。
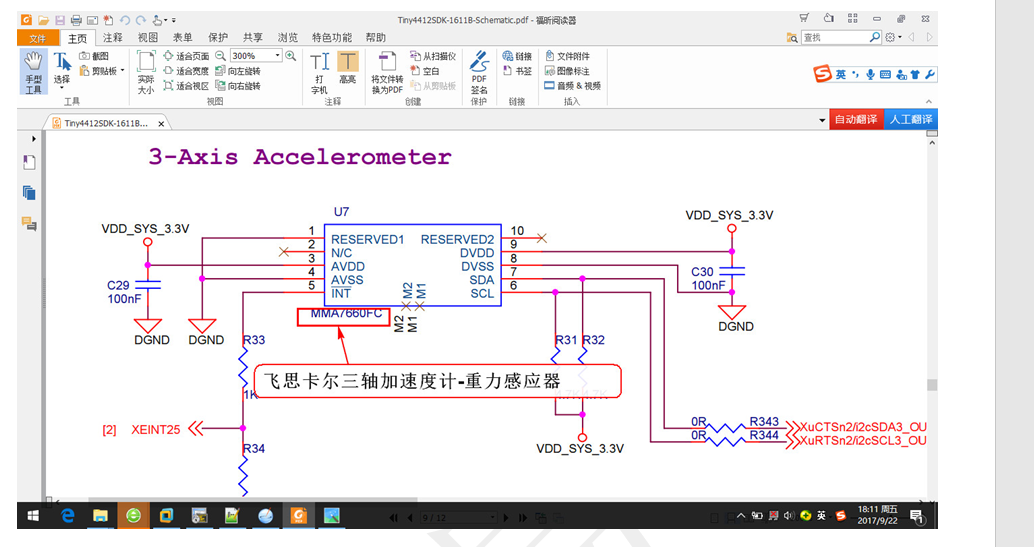
2. 硬件连线
目前使用的开发板是友好之臂Tiny三星4412开发板EXYNOS4412芯片,板本身有一个MMA芯片原理图如下:
内核本身有MMA7660驱动,以下是源码路径:
假如加载自己编写的驱动,还需要去掉原来内核自带的驱动,否则无法匹配。
Device Drivers ---> <*> Hardware Monitoring support ---> <*> Freescale MMA7660 Accelerometer (将*号去掉,编译内核、烧写内核即可) 3. 源代码
3.1 mma7660设备端代码: IIC子系统
#include <linux/init.h> #include <linux/module.h> #include <linux/platform_device.h> #include <linux/i2c.h> #include <linux/gpio.h> #include <mach/gpio.h> #include <plat/gpio-cfg.h> static struct i2c_client *i2cClient = NULL; static unsigned short i2c_addr_list[]= {
0x4c, I2C_CLIENT_END};/*地址队列*/ /* 1. 获取控制器(总线) 2. 检测设备是否存在 3. 定义一个名字来找到驱动端 */ static int __init mma7660_dev_init(void) {
/*mach-tiny4412.c*/ struct i2c_adapter *i2c_adap=NULL; /*获得的总线存储在这个结构体中*/ struct i2c_board_info i2c_info; /*设备描述结构体,里面存放着设备的名字还有地址*/
/*1. 获取IIC控制器*/
i2c_adap = i2c_get_adapter(3); /*要使用IIC_3号总线*/
if(!i2c_adap)
{
printk("获取IIC控制器信息失败!\n");
return -1;
}
memset(&i2c_info,0,sizeof(struct i2c_board_info)); /*清空结构体*/
strlcpy(i2c_info.type,"mma7660_drv",I2C_NAME_SIZE); /*名称的赋值*/
i2c_info.irq=EXYNOS4_GPX3(1); /*中断IO口*/
/*2. 创建IIC设备客户端*/
i2cClient = i2c_new_probed_device(i2c_adap,&i2c_info,i2c_addr_list,NULL);
if(!i2cClient)
{
printk("mma7660_探测地址出现错误!!\n");
return -1;
}
i2c_put_adapter(i2c_adap);/*设置模块使用计数*/
printk("mma7660_dev_init!!\n");
return 0;
}
static void __exit mma7660_dev_exit(void)//平台设备端的出口函数
{
printk(" mma7660_dev_exit ok!!\n");
/*注销设备*/
i2c_unregister_device(i2cClient);
/*释放*/
i2c_release_client(i2cClient);
}
module_init(mma7660_dev_init);
module_exit(mma7660_dev_exit);
MODULE_LICENSE("GPL");
3.2 mma7660驱动端代码: IIC子系统
#include <linux/init.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/i2c.h>
#include <linux/irq.h>
#include <linux/interrupt.h>
#include <linux/gpio.h>
#include <mach/gpio.h>
#include <plat/gpio-cfg.h>
#include <linux/workqueue.h>
#include <linux/delay.h>
/* MMA7760 Registers */
#define MMA7660_XOUT 0x00 // 6-bit output value X
#define MMA7660_YOUT 0x01 // 6-bit output value Y
#define MMA7660_ZOUT 0x02 // 6-bit output value Z
#define MMA7660_TILT 0x03 // Tilt status
#define MMA7660_SRST 0x04 // Sampling Rate Status
#define MMA7660_SPCNT 0x05 // Sleep Count
#define MMA7660_INTSU 0x06 // Interrupt Setup
#define MMA7660_MODE 0x07 // Mode
#define MMA7660_SR 0x08 // Auto-Wake/Sleep and Debounce Filter
#define MMA7660_PDET 0x09 // Tap Detection
#define MMA7660_PD 0x0a // Tap Debounce Count
static const struct i2c_device_id mma7660_id[] =
{
{
"mma7660_drv",0}, /*设备端的名字,0表示不需要私有数据*/
{
}
};
static u32 mma7660_irq; /*触摸屏的中断编号*/
static struct i2c_client *mma7660_client=NULL;
static int last_tilt = 0;
#define __need_retry(__v) (__v & (1 << 6))
#define __is_negative(__v) (__v & (1 << 5))
static const char *mma7660_bafro[] = {
"未知", "前面", "背面"
};
static const char *mma7660_pola[] = {
"未知",
"左面", "向右",
"保留", "保留",
"向下", "向上",
"保留",
};
/* 函数功能:读取一个字节的数据 */
static int mma7660_read_tilt(struct i2c_client *client, int *tilt)
{
int val;
do {
val = i2c_smbus_read_byte_data(client, MMA7660_TILT);
} while (__need_retry(val));
*tilt = (val & 0xff);
return 0;
}
/* 函数功能: 读取XYZ坐标数据 */
static int mma7660_read_xyz(struct i2c_client *client, int idx, int *xyz)
{
int val;
do {
val = i2c_smbus_read_byte_data(client, idx + MMA7660_XOUT);
} while (__need_retry(val));
*xyz = __is_negative(val) ? (val | ~0x3f) : (val & 0x3f);
return 0;
}
/* 工作队列处理函数 */
static void mma7660_worker(struct work_struct *work)
{
int bafro, pola, shake, tap;
int val = 0;
mma7660_read_tilt(mma7660_client,&val);
/* TODO: report it ? */
bafro = val & 0x03;
if (bafro != (last_tilt & 0x03)) {
printk("%s\n", mma7660_bafro[bafro]);
}
pola = (val >> 2) & 0x07;
if (pola != ((last_tilt >> 2) & 0x07)) {
printk("%s\n", mma7660_pola[pola]);
}
shake = (val >> 5) & 0x01;
if (shake && shake != ((last_tilt >> 5) & 0x01)) {
printk("Shake\n");
}
tap = (val >> 7) & 0x01;
if (tap && tap != ((last_tilt >> 7) & 0x01)) {
printk("Tap\n");
}
/* Save current status */
last_tilt = val;
int axis[3];
int i;
for (i = 0; i < 3; i++)
{
mma7660_read_xyz(mma7660_client, i, &axis[i]);
}
printk("ABS_X=%d\n",axis[0]);
printk("ABS_Y=%d\n",axis[1]);
printk("ABS_Z=%d\n",axis[2]);
}
/* 函数功能: mma7660初始化 */
static int mma7660_initialize(struct i2c_client *client)
{
int val;
/* Using test mode to probe chip */
i2c_smbus_write_byte_data(client, MMA7660_MODE, 0x00);
mdelay(10);
i2c_smbus_write_byte_data(client, MMA7660_MODE, 0x04);
mdelay(10);
i2c_smbus_write_byte_data(client, MMA7660_XOUT, 0x3f);
i2c_smbus_write_byte_data(client, MMA7660_YOUT, 0x01);
i2c_smbus_write_byte_data(client, MMA7660_ZOUT, 0x15);
val = i2c_smbus_read_byte_data(client, MMA7660_ZOUT);
if (val != 0x15) {
dev_err(&client->dev, "no device\n");
return -ENODEV;
}
/* Goto standby mode for configuration */
i2c_smbus_write_byte_data(client, MMA7660_MODE, 0x00);
mdelay(10);
/* Sample rate: 64Hz / 16Hz; Filt: 3 samples */
i2c_smbus_write_byte_data(client, MMA7660_SR, ((2<<5) | (1<<3) | 1));
/* Sleep count */
i2c_smbus_write_byte_data(client, MMA7660_SPCNT, 0xA0);
/* Tap detect and debounce ~4ms */
i2c_smbus_write_byte_data(client, MMA7660_PDET, 4);
i2c_smbus_write_byte_data(client, MMA7660_PD, 15);
/* Enable interrupt except exiting Auto-Sleep */
i2c_smbus_write_byte_data(client, MMA7660_INTSU, 0xe7);
/* IPP, Auto-wake, auto-sleep and standby */
i2c_smbus_write_byte_data(client, MMA7660_MODE, 0x59);
mdelay(10);
/* Save current tilt status */
mma7660_read_tilt(client, &last_tilt);
mma7660_client = client;
return 0;
}
/* 静态方式初始化工作队列 */
DECLARE_WORK(mma7660_work,mma7660_worker);
static irqreturn_t mma7660_interrupt(int irq, void *dev_id)
{
/*调度共享工作队列*/
schedule_work(&mma7660_work);
return IRQ_HANDLED;
}
/* 匹配成功时调用 */
static int mma7660_probe(struct i2c_client *client, const struct i2c_device_id *device_id)
{
printk("mma7660_probe!!!\n");
printk("驱动端IIC匹配的地址=0x%x\n",client->addr);
mma7660_client=client;
/*1. 注册中断*/
mma7660_irq=gpio_to_irq(client->irq);/*获取中断编号*/
if(request_irq(mma7660_irq,mma7660_interrupt,IRQF_TRIGGER_FALLING,"mma7660_irq",NULL)!=0)
{
printk("mma7660_中断注册失败!\n");
}
/*2. 初始化mma7660*/
if(mma7660_initialize(client) < 0)
{
printk(" 初始化mma7660失败!\n");
}
return 0;
}
static int mma7660_remove(struct i2c_client *client)
{
free_irq(mma7660_irq,NULL);
printk("mma7660_remove!!!\n");
return 0;
}
struct i2c_driver i2c_drv =
{
.driver =
{
.name = "mma7660",
.owner = THIS_MODULE,
},
.probe = mma7660_probe, //探测函数
.remove = mma7660_remove, //资源卸载
.id_table = mma7660_id, //里面有一个名字的参数用来匹配设备端名字
};
static int __init mma7660_drv_init(void)
{
/*向iic总线注册一个驱动*/
i2c_add_driver(&i2c_drv);
return 0;
}
static void __exit mma7660_drv_exit(void)
{
/*从iic总线注销一个驱动*/
i2c_del_driver(&i2c_drv);
}
module_init(mma7660_drv_init);
module_exit(mma7660_drv_exit);
MODULE_LICENSE("GPL");