前言
本科毕业于自动化。在此期间,我学习了各种电机运动控制原理和自动控制原理,但我只能参加考试,但没有被调查。我最近接触到了simplefoc这个基于arduino开源无刷电机驱动库,想借此机会将本科学到的内容运用到实践中,于是就有了这个小项目,。 与普通汽车使用的刷电机相比,无刷电机在相同体积下具有更大的扭矩。无刷电机可以直接驱动汽车,而不是需要减速器来满足扭矩要求,响应速度更快。无刷电机可以使汽车更加紧凑和美观。 无刷电机的驱动电路和算法应该更加复杂。当无刷电机低速工作时,磁场定向控制算法应用于算法层面FOC(Field-oriented control),它可以准确地控制电机的位置,速度甚至电流,即扭矩,从而产生许多有趣的东西。foc的无刷电机在机器人关节,相机云台电机控制等领域得到广泛应用。
主要功能
- 板载双路无刷电机驱动及电流环芯片,每路最大电流2.5A,可驱动两台云台无刷电机,可控电流
- 汽车可以通过手机自平衡app蓝牙连接控制进退,转向
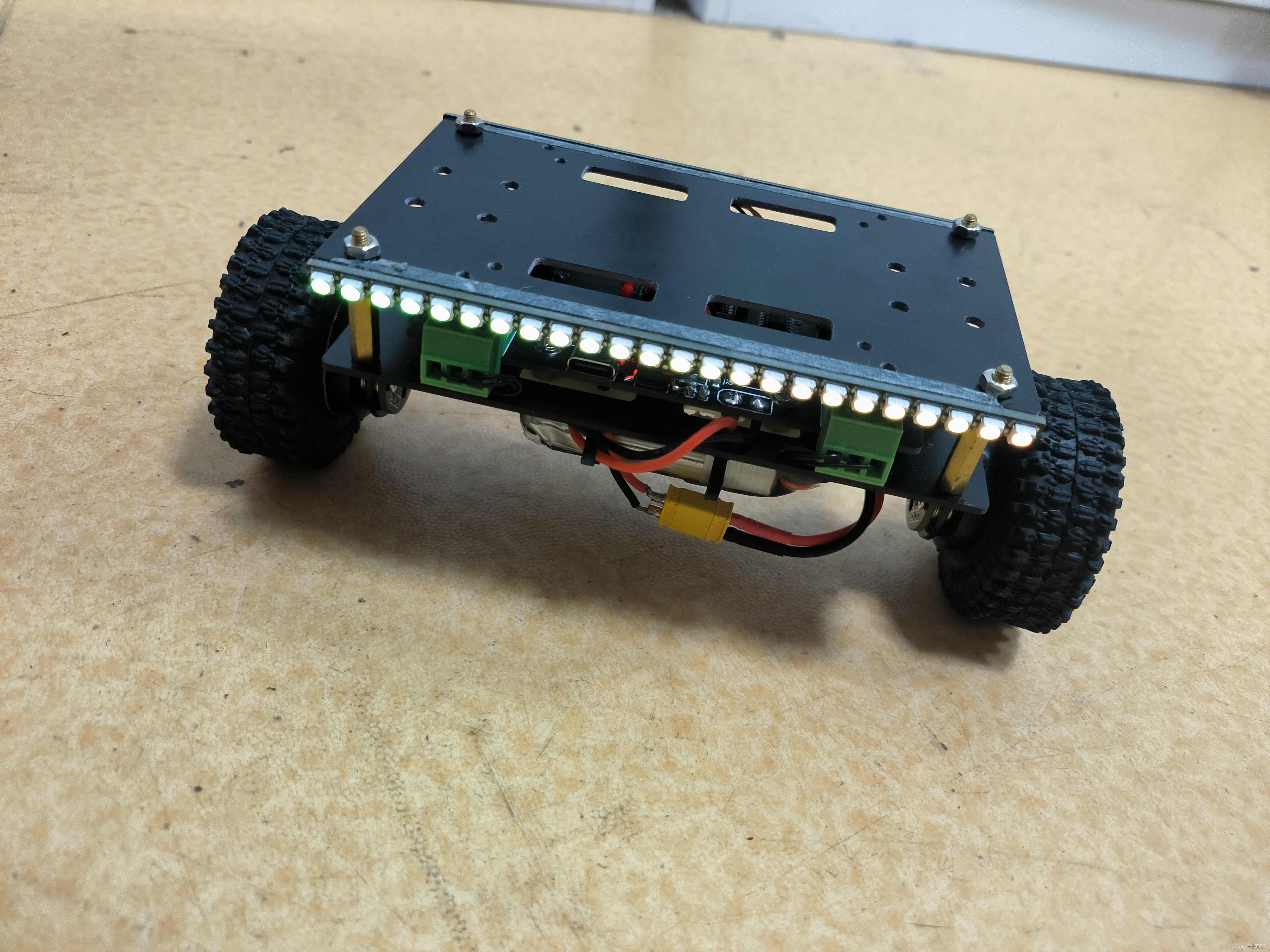
- 搭载双排RGB,每排共24盏灯,可扩展到更多,实现多种照明特效,不影响车辆控制
- 通过外接传输接口ESP-CAM模块实现WIFI可在手机上查看图传(20220421 插图画不能反用。
开源数据链接
链接博客文档 https://blog.csdn.net/weixin_42487906/article/details/124898392
视频链接 https://www.bilibili.com/video/BV1Sv4y137FG/
github仓库,有代码,3D打印文件,pcb制板文件: https://github.com/FranHawk/simplefoc_balance_car
立创eda工程 在线查看原理图和pcb: 有三个板 :https://oshwhub.com/FranHawk/balance_car_esp32_simplefoc 编码器板:https://oshwhub.com/FranHawk/as5600-16mm :https://oshwhub.com/FranHawk/rgb_strip
材料采购链接
所有的电子元件材料都可以比较BOM在淘宝或立创上购买手表或工程原理图。以下是一些关键材料的链接
:【淘宝】https://m.tb.cn/h.ft947n2?tk=gn3u2P8IocI「L6234PD L6234D L6234 HSOP 原装汽车IC 热卖进口芯片 质量超好」点击链接直接打开 电机芯片 这家店买的货还算便宜 优信电子等都可以找到,财力充足的可以直接创造,省事。 【淘宝】https://m.tb.cn/h.fslSDE8?tk=G8Pk2P8HluO「清仓HJ2210-75T无刷云台电机狗3云台专用 航拍电机 云台空心轴马」点击链接直接打开 【淘宝】https://m.tb.cn/h.ft9UFV4?tk=L8Ez2P8u1Ma「AXIAL 1比24车SCX24 90081小米吉姆尼用橡胶爬轮胎皮直径52mm」点击链接直接打开 【淘宝】https://m.tb.cn/h.fsl86Kp?tk=i9Oo2P8FvxY「390电机支架 385固定座 365安装底座 380马达固定架 送螺丝螺母 点击链接直接打开 【淘宝】https://m.tb.cn/h.fH9ybkd?tk=2OCV2P8vqAf「平衡小车DIY专用亚克力支架板扩展板」点击链接直接打开 【淘宝】https://m.tb.cn/h.fGk2f0O?tk=33dF2PjbvTN「航模电池5200mAh 11.1V足容高C7.4V车模船模 RC攀爬车质量保证」点击链接直接打开
- sh1.0 mm的线,3P和4P的,直接购买的线不能使用,需要焊接并更改顺序
- m2.至少8个螺钉mm长,和m2.5用于固定编码器、电机和电机支架的垫圈
- m3 6mm长的螺钉,m35 6mm的铜柱,m320 6mm铜柱,m3螺母若干
- AB用于将径向磁铁固定在电机轴上
- 绑带和魔法贴纸用于固定主板和电池
- 3.81mm插头用于将电机线插入主板,XT用于连接主板电池、红黑电源线的30公头接口
制作步骤
1.电路部分
打开开源资料链接上的三个pcb项目在嘉立创投板生产,购买并焊接所有部件
主板按上图用红黑电源线焊接XT30 公头插头
编码器板没有组件,记得焊接上面的焊点,背面有一个as5600芯片要做两个 焊灯没什么好说的。总共有两个
分别做两个连接RGB从板和编码器板到主板,接线前注意检查编码器板和主板的线顺序是否对应。如果我买了相反的,我需要自己改变顺序
机械部分
制作两个电机部件 先将径向磁铁粘在电机轴上 使用编码板、电机支架和电机m2.5螺钉按上图组装,中间加一些垫片,防止相互摩擦,如下图所示 3D打印轮毂,放在电机上,然后放在胎皮上,3D打印文件在github里
组装
3D用魔术贴和扎带打印固定板固定电池m3*5 3.铜柱和螺钉D印刷固定板和主板组装 使用两个电机部件和主板部件m3螺钉组装,电机线通过3.8mm 插头连接到主板,顺序随意。编码器板使用sh1.0 mm 4P第一层亚克力板上有四条线连接m3 20mm铜柱,如下图所示 RGB灯板和第二层亚克力板粘在一起 连接RGB线到主板,固定第一层和第二层亚克力板,完成组装
烧写程序
通过vscode platformio来烧写程序 在第一次烧写程序之前,先找到它hw_bldc.cpp里的hw_bldc_init()函数里 有这样几句
motor_0.init(); motor_1.init(); motor_0.initFOC(); motor_1.initFOC(); 第一次烧写时,initFOC不需要有参数。simplefoc自检程序将在串口中运行,检测电机的旋转方向和电角出,通过串口得到参数后填入initFOC
motor_0.init();
motor_1.init();
motor_0.initFOC(4.53, Direction::CW);
motor_1.initFOC(0.64, Direction::CCW);
如上,每个人的这两个参数都是不一样的,然后第二次烧写代码。之后每次启动就不会消耗时间自检了。
手机控制
手机安装点灯APP,https://diandeng.tech/dev 创建一个蓝牙设备,添加一个手柄控件,起名叫JoyKey 对于灯光效果的遥控可自行开发
硬件分析与概要设计
电路部分分为一个主板,两个编码器小板,两个RGB灯板
- 其中主板部分集成了无刷电机驱动,控制部分,MPU6050传感器,供电,串口和各种接口
- 驱动器板搭载AS5600磁编码器,通过IIC与主板通信
- 主板为RGB提供5V电源与控制信号 电机采用2210无刷云台电机,7对极
无刷电机驱动部分
驱动是小车的核心部分,是小车动起来的关键。无刷电机转动时需要分别控制电机的三相电压。采用FOC算法控制时,还需要位置传感器提供转子和定子的相对位置,如果要控制转矩,还需要电流传感器。初次学习FOC,我采用灯哥开源FOC驱动的方案,灯哥github仓库地址。 电机驱动采用L6234P三相H桥集成驱动芯片 电流检测采用INA240A2芯片,放大增益为50,这个芯片也比较贵,可以用INA240A1代替,放大增益为20,我焊的时候用的就是这个,一样能用。 电机位置检测采用AS5600绝对值磁编码器芯片,IIC通讯,我为这个芯片画了个小板子附在电机轴处,与主板相连,同时还需要在电机轴线处固定一个径向磁铁。
控制部分
由主要功能可知,需要MCU具有蓝牙和WIFI功能,还需要足够的性能用于FOC算法,同时控制RGB。最近看到的esp32可以说正合适,esp32有320K RAM,4M ROM,两个core,一个核专门用来跑foc算法,另外一个核用来跑其他程序包括RGB控制,simplefoc官网上说esp32单次foc运算能有1ms,引脚也足够多,满足平衡控制的需求。
传感部分
平衡控制需要通过传感器检测到小车自身的姿态,我采用最常见的MPU6050 6轴加速度计陀螺仪芯片 WIFI图传由主板通过2.54排母插接ESP-CAM模块实现
电源部分
- 电池选用3S 900mah航模电池,提供12V电压给电机
- TPS5430开关芯片将12V转5V,供给到RGB和ESP-CAM模块
- AMS1117将5V降到3.3V
RGB部分
RGB采用WS1802B LED灯,MCU一个IO口就可以驱动一串RGB
其他
其他一些接口和转串口芯片什么就不多介绍了,可以看我开源的电路工程了解
理论基础
无刷电机平衡小车的理论部分需要了解
1.无刷电机磁场定向控制FOC算法 2.平衡车建模和控制算法
理论部分网上有很多资料,讲解也非常清楚易懂,珠玉在前,我引出一些比较好的文章,供想要深究的读者查看
磁场定向控制FOC算法
FOC算法的内容比较多,初学者可以看下稚晖君这篇文章,比较通俗易懂
- 深入浅出讲解FOC算法与SVPWM技术
simplefoc官方文档的介绍也比较详细,还有源码讲解,代码中也用到了simplefoc的库,所以最好去官网文档了解一些simplefoc的使用方法 https://simplefoc.com/
其他比较好的文章
- BLDC电机控制算法——FOC简述
- foc学习笔记1——准备工作
平衡车建模和控制算法
- 平衡车建模部分首推 清华卓晴的平衡车参考方案 对平衡车的数学模型的建立有非常清晰的介绍,需要熟悉平衡车模型的可以多看几遍
- 平衡车平衡环和速度环pid的整定可以看这篇文章 平衡小车PID,就该这么调!!!
软件部分
ESP32这款MCU有两个核心,我采用freertos来对两个核进行调度,整体软件框架基于arduino+freertos
用到的库
Adafruit_NeoPixel 用于驱动RGB灯带 blinker-library点灯科技的蓝牙库,可以通过手机app和平衡车蓝牙通讯 MPU6050_lightMPU6050驱动库 Arduino-FOCsimplefoc的arduino支持库
task 0:simplefoc的电流环的运算、俯仰角数据读取的和电机电压的输出 task 1:平衡环和速度环pid运算 task 2:RGB闪烁和通过蓝牙接收手机的控制命令
TASK 0
这个任务的代码比较简单,loopFOC和move负责simplefoc电流环的运算和电压输出 mpu.update()读出MPU6050数据并返回俯仰角,俯仰角通过互补滤波结算得到就可以了 shaftVelocity返回电机速度,用于task 1速度环pid的运算
void task_motor_move(void *pvParameters)
{
while (1)
{
// iterative setting FOC phase voltage
motor_1.loopFOC();
motor_0.loopFOC();
// Serial.printf("d:%f,%f\n",motor_1.shaftVelocity(),motor_0.shaftVelocity());
motor_1.move(motor_output_left);
motor_0.move(motor_output_right);
// // iterative function setting the outter loop target
mpu.update();
speed_right = motor_0.shaftVelocity();
speed_left = motor_1.shaftVelocity();
}
}
TASK 1
该任务主要是平衡环和速度环pid运算,用状态机的思维将平衡车状态分为STOP,RUNNING,PICKUP三个状态,这样做主要是为了避免平衡车被拿起时电机疯转。 开机时状态为STOP,把车扶正到平衡位置附近则进入RUNNING状态,当拿起倾斜角后过大,则进入PICKUP状态,逆时针旋转车体后进入STOP状态。 RUNNING状态运行平衡环,速度环和角度环。平衡环采用pd,速度环用pi,角度环仅用单p。
void task_control(void *pvParameters)
{
while (1)
{
angle_pitch = mpu.getAngleY();
// Serial.printf("d:%f\n",angle_pitch);
acc_Z = mpu.getAccZ();
if (running_state == STATE_STOP)
{
if (abs(angle_pitch - angle_pitch_offset) < 0.5)
{
running_state = STATE_RUNNING;
}
}
else if (running_state == STATE_RUNNING)
{
speed_average = (speed_right + speed_left) / 2;
if (abs(angle_pitch - angle_pitch_offset) > 50 )
{
speed_I_sum=0;//清空积分系数
running_state = STATE_PICKUP;
}
else
{
speed_target = translate_speed;
speed_error = speed_target - speed_average;
speed_I_sum+=(speed_error*speed_I);
if(speed_I_sum>15){
speed_I_sum = 15;
}
if(speed_I_sum<-15){
speed_I_sum = -15;
}
angle_target_pitch = speed_P * speed_error + speed_I_sum;
motor_output_left = angle_P * ((angle_pitch - angle_pitch_offset) - angle_target_pitch) + angle_D * mpu.getGyroY()+rotate_speed; //+ angle_D * mpu.getGyroY()
motor_output_right = angle_P * ((angle_pitch - angle_pitch_offset) - angle_target_pitch) + angle_D * mpu.getGyroY()-rotate_speed;
angle_last_pitch = angle_pitch;
}
}
else if (running_state == STATE_PICKUP)
{
motor_output_left = 0;
motor_output_right = 0;
if (speed_right > 3.14 && speed_left < -3.14)
{
running_state = STATE_STOP;
}
}
vTaskDelay(1);
}
}
TASK 2
task 2用于RGB效果显示,和接收手机blinker app通过蓝牙发送的数据。一般的RGB等效都有一个延时函数,普通的延时函数都是在原地死等,这样大大降低CPU效率,影响其他程序运行,这里我编写了一系列非阻塞式RGB灯效:在显示完灯效后不再原地延时,而是直接进行调度,切换到其他task。详细可看我代码。
void task_neopixel(void *pvParameters)
{
uint32_t neopixel_pattern_previous = 0;
uint32_t neopixel_pattern_interval = 500;
uint32_t neopixel_pattern_number = 0;
while (1)
{
// 效果切换
if((neopixel_count-neopixel_pattern_previous)>neopixel_pattern_interval){
neopixel_pattern_previous = neopixel_count;
neopixel_pattern_number++;
neopixel_state_clear(strip_1_handler);
neopixel_state_clear(strip_2_handler);
if(neopixel_pattern_number>4){
neopixel_pattern_number = 0;
}
}
switch(neopixel_pattern_number){
case 0:
neopixel_police_style_2(strip_2_handler,10,5);
neopixel_police_style_2(strip_1_handler,10,5);
break;
case 1:
neopixel_police_style_1(strip_2_handler,10,5);
neopixel_police_style_1(strip_1_handler,10,5);
break;
case 2:
neopixel_loop(strip_2_handler, 255, 255, 255, 4, 4);
neopixel_rainbow(strip_1_handler);
break;
case 3:
neopixel_bounce(strip_1_handler, 0, 255, 0, 2, 3, 0);
neopixel_fade_in_out(strip_2_handler, 255, 0, 255, 2, 1,25);
break;
case 4:
neopixel_spread_out(strip_2_handler, strip_2_handler.strip.Color(0,255,0), strip_2_handler.strip.Color(0,0,255), 4, 10);
neopixel_spread_out(strip_1_handler, strip_1_handler.strip.Color(255,0,0), strip_1_handler.strip.Color(255,255,0), 4, 10);
break;
default:
break;
}
neopixel_count++;
#ifdef USE_BLINKER
Blinker.run();
#endif
vTaskDelay(10);
}
}