经纬仪是架空线路基础工程的主要测量仪器之一,可用于测量水平角度、垂直角度、距离和高度。经纬仪种类繁多,其结构也多种多样,一般常用的经纬仪有游标和光学两种。目前主要用于输配电线路工程测量RTK或全站仪测量,但部分施工单位仍采用经纬仪测量。光学经纬仪和电子经纬仪主要用于经纬仪的测量。本次主要详细介绍经纬仪测量。如果我们需要学习其他测量方法,我们将在未来找到介绍的机会。
光学经纬仪常用于线路工程DJ1、DJ2、DJ6 等几种类型。
“D”、“J它是地球测量和经纬仪的第一个汉语拼音字母。数字1、2和6表示仪器的精度等级,即该仪器的第一个测回水平方向的误差,以秒为单位表示。数字越小,仪器的精度就越高。
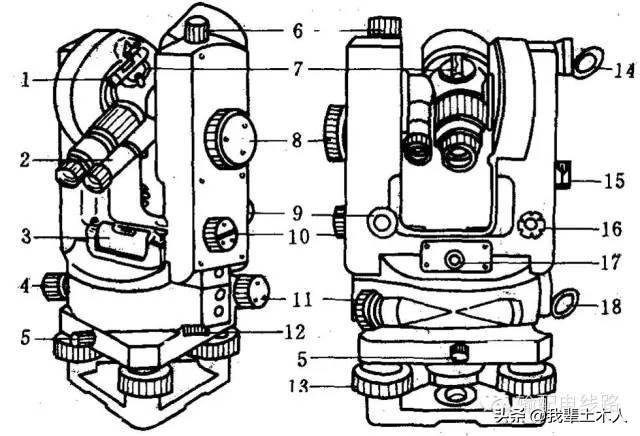
1.望远镜反射手轮
2.读数显微镜
3.按准部水准管
4.按准部制动螺旋
5.固定轴座螺旋
6.制动望远镜螺旋
7.光学瞄准器
8.测微轮
9.望远镜微动螺旋
10.换像手轮
11.照准部微动螺旋
12.水平度盘换手轮
13.脚螺旋
14.竖盘反射镜
15.观察竖盘指标水平管
16.垂直指标水平管微动螺旋
17.光学对中器目镜
18.水平度盘反射镜
中间是将经纬仪水平度盘的中心放置在测量站的铅垂线上。方法步骤如下:
1.经纬仪放置在测量站,目估大致对中;(记)
2.旋转光学对点器的目镜,使分划板清晰;
3.拉出或推进对中器的物镜管,使测试站的标志成像清晰;
4.双手提脚架,一条腿前后左右摆动眼睛,寻找中间设备的目标,使测量站点标志的图像准确地位于划分板小圆圈的中心。
平整的目的是使仪器的垂直轴垂直,水平度盘水平,操作步骤如下:
1)使基面水平,(记)
三角架三条腿的长度来回调整,使基面圆水准器的气泡落入小圆圈。(粗平)
注意:调节三脚架架腿时,要使用双手操作,避免因操作用力不当,大幅度地晃动仪器会出现损坏仪器的现象。同时,要注意三脚架的三个腿要踩实。
2)在圆水准器气泡中间的前提下,旋转仪器,使照准部水准管与任何两个脚螺旋的连接线方向平行。
3)双手同时向内或向外旋转这两个脚螺旋,使水平管的气泡在中间(注:气泡移动方向与左手拇指旋转时相同)。
4)气泡居中后,仪器照准部旋转90°,再 用第三个脚螺旋使气泡居中。
5)按上述步骤重复,直至长水平管在任 气泡偏离中心不超过半格的位置。
6)在架头上移动仪器,准确对齐 。
7)重复(2)-(4)步骤,既满足精确对中, 满足气泡居中。
平整操作方法:(气泡方向与左手母指旋转方向一致)
1.目镜调焦对光:
松开经纬仪望远镜、水平制动和垂直制动螺旋,使望远镜面向天空或远处,旋转目镜调焦螺旋,直到望远镜内的十字线清晰。
注:如果同一个人观察,在观察过程中不需要调整目镜的光线。否则需要检查仪器。
2. 照准标志:
测量角度时,仪器放置点称为测量站点,远程目标点称为照准点。必须在照准点上设置照准标志,以便于瞄准。测量角度时使用的照明标志包括花杆、视距尺、塔尺或钻头测量、垂球线等。
3.粗瞄准目标:
使用望远镜上的间隙和准星(或瞄准器)来确定目标,使观测目标在望远镜的视野中,即拧紧望远镜和制动螺旋。
4.物镜调焦对光:
旋转望远镜对光螺旋,使观测目标图像清晰,注意消除视差(消除视差的方法与水平仪相同)。
5.准确准确:
当目标成像较细时,可以使用交叉线纵向线的单线标准目标。旋转标准部的微螺旋,使观测目标准确地与交叉线纵向线重叠。如果目标是基准或成像有一定宽度,即使目标成像准确地夹在双线中间,也可以使用交叉线纵向线的双线标准目标。这种情况要求标准目标必须垂直,用双线检查标准目标是否对称。
注:当旋转准确部分的微螺旋准确准确时,微螺旋的旋转方向应尽可能一致。如果旋转但没有准确的目标,不要使用旋转方法来准确目标。松开制动螺旋并重新准确,以避免因微螺旋间隙差而造成的测量误差。
图 目标点瞄准法在瞄准目标时,应使用十字丝的中心部分。如果观察水平角,可以根据目标图像的大小,将目标图像夹在双纵线中,与双纵线对称,或与目标重叠,如上图所示。如上图所示,以减少目标倾斜对水平角的影响(b)、(c)应尽可能瞄准目标底部。如果以垂球线为目标,应注意使垂球尖准确对准正测点,瞄准垂球线上部,如上图所示(a) 。
1.度盘读数
两个度盘读数都是用望远镜旁边的读数显微镜读取的。水平度盘图像用水平度盘照明反射镜(18),垂直度盘图像用垂直度盘照明反射镜(14)。J2光学经纬仪的读数窗中只能看到水平度盘或竖直度盘二者之一的影象。
位于支架外侧的换象手轮(10),用以变换两度盘的影像,欲使显微镜中现出水平度盘影像,顺时针方向转动换象手轮(10),到转不动为止,欲使显微镜中现出竖直度盘影像,则逆时针方向转动换象手轮,到转不动为止。
无论度盘图像出现在显微镜中,测微窗的图像总是出现在度盘图像的左侧,旋转读数显微镜目镜(2)都能使度盘图像清晰。
2.水平盘读数
放松止动螺旋(4)和(6),旋转照射准确部分,用望远镜上的光学瞄准器(7)的交叉线粗略找到目标,轻轻锁定止动手轮(4)和(6),旋转照射准确部分的微动螺旋(11)和望远镜的微动螺旋(9),使望远镜分割板的交叉线准确瞄准目标。目标小于双线的宽度应用双线瞄准,否则用单线瞄准。
顺时针旋转换象手轮(10),使盖面白线水平,打开旋转水平板照明镜(18),使水平板具有均匀、明亮的光照。调整读数显微镜目镜(2),使度盘图像清晰、清晰。打开水平板,更换手轮盖,更换手轮(12),以便在读数窗口中看到所需的读数。(水平调整)
关闭护罩时,转动和更换手轮(12)时注意不要用力过大,以免影响望远镜垂直丝偏离目标。更换度盘位置后,检查望远镜中看到的目标是否移动。
测微手轮的最终旋转必须朝着同一顺时针的方向进行。当测微手轮转动到测微尺未标记时,注意不要继续转动,以免损坏测微尺。
3.读数方法
J经纬仪读数窗口有两种,一种是上图(一),整个度数由上窗中央或左侧的数字读取171°,上窗中小缺口的数字为10位数;左窗左边的数字是整分数,右边的数字是整十秒从上到指标线的个位秒数为整秒。
测微尺上下共刻600格,每小格为1″,共计10′,左边的数字是分数,右边的数字是10″,再数到指标线的格数,即秒数。度盘上读取的读数和测量尺上读取的读数之和是所有正确的读数。如上图所示:9′ 2×10″ 6″=9′26″
图 度盘读数(2)1)当小窗口读数为4或5时,应读取窗口中偏左或居中值的整度数,
2)当小窗口读数为0、1、2时,左侧的整度数可能不均匀,此时应读取右侧或中间值,
3)小窗口出现3值时,上述应读度一般在中间。
另一个,如上图所示,按照左(中心偏左或中心),倒像右(中心偏右或中心),最近一对注有度数的对径划分(两者相差180°)进行,像分线所注度数为读取度数;像分线和倒像分线之间的格数乘以整十分,即整十分,不到10分′的余则在测微尺上读得。
J2 的读数方法 一般采用对径重合读数法——转动测微轮,使上下分划线精确重合后读数。
4. 竖直度盘读数
反时针方向转动换象手轮(10)至转不动为止,使盖面白线成竖直位置,打开和转动竖盘照明反光镜(14),使竖直度盘有均匀、明亮光线照明,按上述读数符合方法和读数方法即可读得竖直度盘的读数。
但在每次读数前应旋转竖盘指标微动螺旋(16),使得在观察棱镜(15)内看到的竖盘水准器水泡精确符合(即望远镜在盘左位置,当水准器的气泡居于中央时,竖直度盘的读数是90°)。
在视距测量之前,应调整镜筒处于水平状态,即读数窗口中出现90°0′0″(盘左)或270°0′0″(盘右)
图 a
图 b调整方法:
1、先调节读数测尾轮(8),使右图左窗口至零分划线位置;
2、利用望远镜上、下转动粗调,使读数窗口中出现如图a所示,固定镜筒;
3、利用微调旋钮(9)调整窗口中下方方格内三根竖丝上、下对齐如图b;
4、当满足下图时,即为90°0′0″,镜筒处于水平状态或镜筒的中丝与塔尺成垂直状态。
1、视准轴水平时视距测量
如上图:在桩位中心O1安平仪器,当望远镜视线水平时(镜筒处于90°0′0″或270°0′0″),视线OM和视距尺垂直相交于M点,从望远镜内上下视距线a、b出发的平行光线,经物镜折射后,经过物镜生焦点F与视距尺相遇于A、B两点,两点间距离R叫做视距,尺离仪器越远,R值就越大,反之就越小,根据R值和几何关系即可算出仪器中心O到尺间的水平距离D;
同时在望远镜镜筒中丝在视距尺M点的读数即为仪器高度。
竖直角的识读计算
在桩位中心O1安平仪器,当望远镜视线水平后(镜筒处于90°0′0″或270°0′0″),转动望远镜镜筒瞄准目标得到一个角度为α,则找正目标后的竖直θ为:
当左盘时:θ=90°—α;
当右盘时:θ=α-270°;
水平视距的计算:
望远镜分划板上有上、下两短线,它与标尺配合,可以求得测站点到标尺之间的距离。
D=KR+C式中:
D——目标到测站点的距离(m);
R——上下视距丝在标尺上所截长度(m)
K——视距乘常数,K=100;
C——视距加常数,C=0。
2、视准轴倾斜时视距测量:
如图所示:在倾斜地面上进行规距测量,视线OM不能垂直尺面,而和水平线OG开成垂直角θ,不能使用视准轴水平时计算公式,要求水平距离D,就必须进行以下两步推导:
(1)从不垂直于尺面的视距AB求出垂直于尺面的Aˊ、Bˊ求出斜距离OM。
AˊBˊ= A B cosθ= R cosθOM = KRcosθ + C(2)从斜距离OM求出水平距离D
D = OM×cosθ =(KRcosθ + C)×cosθ =KRcos2θ + Ccosθ内对光望远镜,式中Ccosθ可以省略,水平 距离计算公式为:
D = KRcos2θ式中:
D——O1和P之间水平距离;
R——望远镜内两视距丝所截得的长度;
K——望远镜的视距常数,K=100;
θ——倾斜视准轴线和水平线间竖直角。
1、视准轴水平时高差及高程的测量:
从图中可以看出,桩位中心O1和P点间高差及高程为;
H=i-tHP=HO1+H式中:
H——P点相对于桩位中 心O1点高差。
i——仪器高度;
t——P点的视线高;
HO1——O1点的高程;
HP——P点的高程。
2、视准轴倾斜时高差及高程的测量
由图可看出,O1和P点间高差及高程为:
H = h + I - tH = KRcosθ×Sinθ = KRsin2θ / 2Hp = H01 + H式中 h—仪器旋转中心至尺上照准点的垂直距离,称初算高差,仰角时为正,俯角时为负。
为简化计算,在观测时,常使t=i,则
H=h
测量对障碍物净空距离:
可将经纬仪架设在横线路 方向的适当位置处。调整好仪器,将塔尺分别立在
导线垂直下方的A点和房屋最高点B点的地面上,测量并标出仪器至导线的水平距离S2和仪器至房屋的水平距离S1,然后测出房屋高度角θ1和导线高度角θ2。
导线对障碍物的净空距离为:
S1---测点到障碍物最高点水平距离
S2---测点到导线与障碍物间最近点的水平距离
S2tgθ2---导线对测点的高差
S1tgθ1---障碍物最高点与测点的高差
测量线路交叉跨越距离时,可将经纬仪架设在线路交叉点交叉角的近似等分线的适当位置上。调整好仪器,并在被测线路交叉点垂直下方立好塔尺。先读取中丝h和视距s,然后沿垂直方向转动望远镜筒,使镜筒内“十”字分划线的横线分别切于交叉点的上线和下线,从而得到两个垂直角θ1和θ2,
1—仪器 ;
2—交叉点 ;
3—交跨导线
经纬仪至交叉点的水平距离为:
S=100L交叉点间的垂直距离:
H1=S(tgθ2--tgθ1)
1、正方形基础分坑的参数计算:
已知:a为基础根开,d为坑口边长,P为 铁塔中心,
2、分坑前首先算出L0、 L1、 L2值分别为:
3、分坑方法:
1)在中心点P安平经纬仪并前视相邻杆塔位中心桩无误后,固定水平度盘得到初始水平角:为×°×′×″并记录;
2)然后将仪器顺转45°(初始角加45°)定出KⅢ、KⅠ两辅助桩,继续顺转至135°定出KⅣ、KⅡ两辅助桩,
3)自P点沿P KⅢ方向分别量水平 距离L1、L2定出d1点和d3点,
4)然后取尺长为2d,将两端头分别置于d1点和d3点,用手钩住皮尺中部d处向外拉直即得出d2点,再折向另一侧得出d4点,d1-d4点的连线即为坑口位置。
5)利用同样的方法,可以分别定出其余三个坑口的位置。
精确地定出A、B、C、D四个控制桩:
1)将仪器安置于中心桩O点,瞄准前、后线路方向辅 助桩无误后,在此方向上确定A、B两点,使 :
AO=BO=(x+y)/2。
x、y分别为矩形塔腿的长、短根开的距离。
2)将仪器镜筒旋转90°,在横线路方向上定出C、D控 制桩,
同样使:CO=DO=(x十y)/2。
3)将仪器安置于A点,瞄准D点即得AD线,在此线上 量取 PD=O.707(y+a),
QD=0.707(y一a),得P、Q两点。a为基坑边长。
4)取2a线长,将两端分别置于P、Q两点, 拉紧线的中点即得M点,反方向即得N 点。
5)取石灰粉沿NPMQ在地面上画白线,即得 第三只基坑。
6)仪器仍在A点,将仪器镜筒从D点旋转90°观测到C点,同样从AC线上可以画出第 二只基坑白粉线。
7)将仪器置于B点,依同样方法划第一只和 第四只基坑。
8)复核图纸及整个塔基尺寸,完全正确无误 后,用铁锹沿粉线在四周挖土。
9)在 AD线上,若自A点开始量取P、Q点,
AP=O.707(x一a),AQ=O.707(x+a),
同样可得基坑的四角NPMQ。从B点起 量亦相同。
如上图所示:不等高塔腿基础根开有三个值,假定分别为a、b、c,坑口边长为d,
计算出L1、L0、L2、以及H1、H2、H0分别为;由此可按上述正方形基础(或矩形基础)分坑法划出各坑口位置。
1、等长法观测弧垂:
等长法以称平行四边形法,是最常用的方法。
1)从观测档两侧架空线悬点垂直向下量取选定的弧垂观测值,绑上弧垂板,调整架空的拉力,当架空线与弧垂板相切时,中间弧垂即为施工要求的弧垂。
2)当温度变化而引起弧垂变化时,可移动一侧弧垂板调整,调整量是弧垂变化值⊿f的2倍。
3)若气温变化较大时,(大于10℃)则需要重新在观测档两侧设置弧垂板。
4)等长法观测弧垂精度随着两悬挂点的高差的增大而降低,当高差为零时精度最高,当高差大于h>10%·L时,等长法观测会造成较大的误差,应选用异长法观测.
2、异长法观测弧垂:
a. 采用异长法观测弧垂时,选择一侧悬挂点弧垂板绑扎点的距离a值,(a≠f,使视线切点尽量靠近弧垂最低点)
根据关系式:√a+√b=2√f,
得:
式中:
a-观测档一端所选的架空线路悬挂 点至弧垂板的距离。
b-观测档另一端架空线悬点至弧垂 板的距离。
f-观测档的弧垂。
b. 在观测档的另一侧在悬挂点垂直下方量 b值,绑弧垂板调整架空线的拉力,当 架空线与弧垂板相切时,中间弧垂即为 施工弧垂。
c. 当气温发生变化时弧垂也随至变化,可移动一侧弧垂板调整,调整量
⊿a=2⊿f· √a∕f例:设已知f=8m,a=4m,求b值。
解:b=(2×√8-√4)2=13.4m
设原绑弛度板时的弛度f=8.0m, a=4.8m,因气温变化新弛度值f′=8.5m, ⊿f=0.5m求⊿a值.
解: ⊿a=2×⊿f× (√a∕f)=2×0.5×(√4.8/8)=0.775m
3、角度法观测弧垂:
角度法是用经纬仪观测弧垂的方法,可分档端、档外、档内、档侧多种角度观测法,在线路施工中常用档端观测法。下图中(a)为档端仰角观测法,图(b)为档端俯角观测法
档端观测方法:
a)经纬仪安置在档端低悬挂点的下方:
图中:
a——仪器中心至A的垂直距离;
f——根据观测弧垂时的气温选出的档距中点弧垂;
θ——仪器视线与导线相切时的垂直角,仰角为正, 俯角为负;
α——仪器安置在A点,瞄准B点时的垂直角度;
L——档距,米;
b)经纬仪安置在档端高悬挂点下方:
Tgθ=-(tgα-b/L)
根据悬挂点的高差,可直接计算θ值,
θ=tg-1(±h-4f+4√af)/L
式中:高h:仪器在低悬挂点时,h取”+”
仪器在低悬挂点时,h取“-”
档端观测方法:
1)安置仪器于观测档架空线悬挂垂直下方A’点,取长度a,
2)调整经纬仪观测值(根据温度变化调整),
3)调整架空线的张力,使架空线与仪器中横丝相切,这时架空线的中点弧垂就是施工弧垂,
4)水平偏转望远镜筒,使边线与横丝相切,即为边线弧垂,
5)温度变化时调整观测值:适用范围:
由公式√a-√b=2√f可得:
当b≤0时,4f≤a,角度法和异长法都不适用,说明角度法适用范围为b<0,a>4f,当b值越小此法的精度越高。
例:设仪器安置在低悬挂点垂直下方A′点,已知观测档的弧垂f=12.5m,档距L=275m,导线悬挂点高差h=25.72m,导线悬挂点至仪器的中心垂直距离a=25m,求弛度观测角θ。
解:θ=tg-1(±h-4f+4√af)/L
仪器在低悬挂下方h取”+“,代入数据:
θ= tg-10.16883=9.58°