文章目录
常用的反馈控制电路如下: (1)APC自动相位控制电路,锁相环电路 (2)AGC自动增益电路 (3)AFC自动频率控制电路
本模块重点介绍自动相位控制电路,即PLL锁相环电路
一、什么是锁相环
在工作过程中,当输出信号的频率等于输入信号的频率时,输出电压与输入电压保持固定的相位差,即输出电压与输入电压的相位被锁定,这就是锁相环名称的由来。 锁相环是一个相位误差控制系统,通过比较参考信号和输出信号之间的相位误差来调整输出信号,以达到与参考信号相同频率的目的。其基本系统结构如下图1所示。 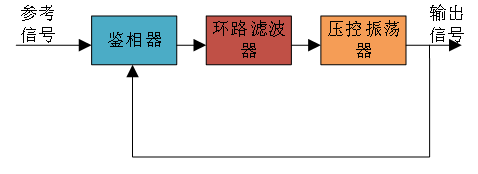 图1 锁相环系统框图
图1 锁相环系统框图
二、基本锁相环的组成
基本锁相环由以下三部分组成
2.1鉴相器(PD-Phase Detector)
识别器通过比较输入信号和压控振荡器输出信号的相位,输出一定的电压信号。输出的电压信号是该信号相位差的函数,具体原理在第三部分介绍。
2.2环路滤波器(LF-Loop Filter)
我们可以将环路滤波器理解为低通滤波器,过滤掉相机输出电压中的高频分量和噪声,只保留低频分量。
2.3压控振荡器(VOC)
压控振荡器由环路滤波器输出电压控制,压控振荡器的振荡频率接近输出信号的频率,直到其频率相同。VCO用于锁定相位的输出信号与输入信号的相位保持着特定的关系。
三、分析锁相环各部分的基本原理
3.1鉴相器(PD-Phase Detector)原理分析
各种形式的鉴相器。目前常用的是正弦波鉴相器,可用乘法器实现。 假设输入信号为 U i ( t ) = U i sin ( ω i t θ i ( t ) ) {U_i}\left( t \right) = {U_i}\sin \left( { {\omega _i}t {\theta _i}\left( t \right)} \right) Ui(t)=Uisin(ωit+θi(t)),压控振荡器的输出为 U o ( t ) = U o cos ( ω o t + θ o ( t ) ) {U_o}\left( t \right) = {U_o}\cos \left( { {\omega _o}t + {\theta _o}\left( t \right)} \right) Uo(t)=Uocos(ωot+θo(t))。
一般情况下, ω i {\omega _i} ωi和 ω o {\omega _o} ωo是不相等的,为了便于比较两者之间的相位差,需要将两者统一为 ω o {\omega _o} ωo以为参考。
则输入信号变换为: U i ( t ) = U i sin ( ω i t + θ i ( t ) ) = U i sin ( ω o t + ( ω i − ω o ) t + θ i ( t ) ) = U i sin ( ω o t + φ i ( t ) ) {U_i}\left( t \right) = {U_i}\sin \left( { {\omega _i}t + {\theta _i}\left( t \right)} \right) = {U_i}\sin \left( { {\omega _o}t + ({\omega _i} - {\omega _o})t + {\theta _i}\left( t \right)} \right) = {U_i}\sin \left( { {\omega _o}t + {\varphi _i}\left( t \right)} \right) Ui(t)=Uisin(ωit+θi(t))=Uisin(ωot+(ωi−ωo)t+θi(t))=Uisin(ωot+φi(t))
上式中 φ i ( t ) = ( ω i − ω o ) t + θ i ( t ) = Δ ω t + + θ i ( t ) {\varphi _i}\left( t \right) = ({\omega _i} - {\omega _o})t + {\theta _i}\left( t \right) = \Delta \omega t + + {\theta _i}\left( t \right) φi(t)=(ωi−ωo)t+θi(t)=Δωt++θi(t), Δ ω {\Delta \omega} Δω表示输出信号角频率与VCO振荡器信号角频率的差,是属于固有的频率差。
为了计算方便,将相位 θ {\theta } θ统一用 φ {\varphi } φ表示,改写VCO输出信号为 U o ( t ) = U o cos ( ω o t + θ o ( t ) ) = U o cos ( ω o t + φ o ( t ) ) {U_o}\left( t \right) = {U_o}\cos \left( { {\omega _o}t + {\theta _o}\left( t \right)} \right){\rm{ = }}{U_o}\cos \left( { {\omega _o}t + {\varphi _o}\left( t \right)} \right) Uo(t)=Uocos(ωot+θo(t))=Uocos(ωot+φo(t))。
重新整理输出信号和VCO输出信号为:
| U i ( t ) = U i sin ( ω o t + φ i ( t ) ) {U_i}\left( t \right) = {U_i}\sin \left( { {\omega _o}t + {\varphi _i}\left( t \right)} \right) Ui(t)=Uisin(ωot+φi(t)) | 式(3-1) |
|---|---|
| U i ( t ) = U i sin ( ω o t + φ i ( t ) ) {U_i}\left( t \right) = {U_i}\sin \left( { {\omega _o}t + {\varphi _i}\left( t \right)} \right) Ui(t)=Uisin(ωot+φi(t)) |
前面谈到的鉴相器本质上就是一个理想模拟乘法器,所以将输入信号和VCO输出信号相乘。
这里用到数学上的积化和差公式: sin α cos β = 1 2 [ sin ( α + β ) + sin ( α − β ) ] \sin \alpha \cos \beta = \frac{1}{2}\left[ {\sin \left( {\alpha + \beta } \right) + \sin \left( {\alpha - \beta } \right)} \right] sinαcosβ=21[sin(α+β)+sin(α−β)] 式(3-1)中两式相乘: U i ( t ) ⋅ U o ( t ) ⋅ A m = 1 2 U i U o A m [ sin ( 2 ω o t + φ i ( t ) + φ o ( t ) ) + sin ( φ i ( t ) − φ o ( t ) ) ] {U_i}\left( t \right) \cdot {U_o}\left( t \right) \cdot {A_m} = \frac{1}{2}{U_i}{U_o}{A_m}\left[ {\sin \left( {2{\omega _o}t + {\varphi _i}\left( t \right) + {\varphi _o}\left( t \right)} \right) + \sin \left( {
{\varphi _i}\left( t \right) - {\varphi _o}\left( t \right)} \right)} \right] Ui(t)⋅Uo(t)⋅Am=21UiUoAm[sin(2ωot+φi(t)+φo(t))+sin(φi(t)