微信搜索【沛华测控】订阅我们
避障小车可以说是很多学单片机的学生必须做的小项目,正好Shania手里有几个光电传感器,今天就来玩红外避障车吧!
请看视频
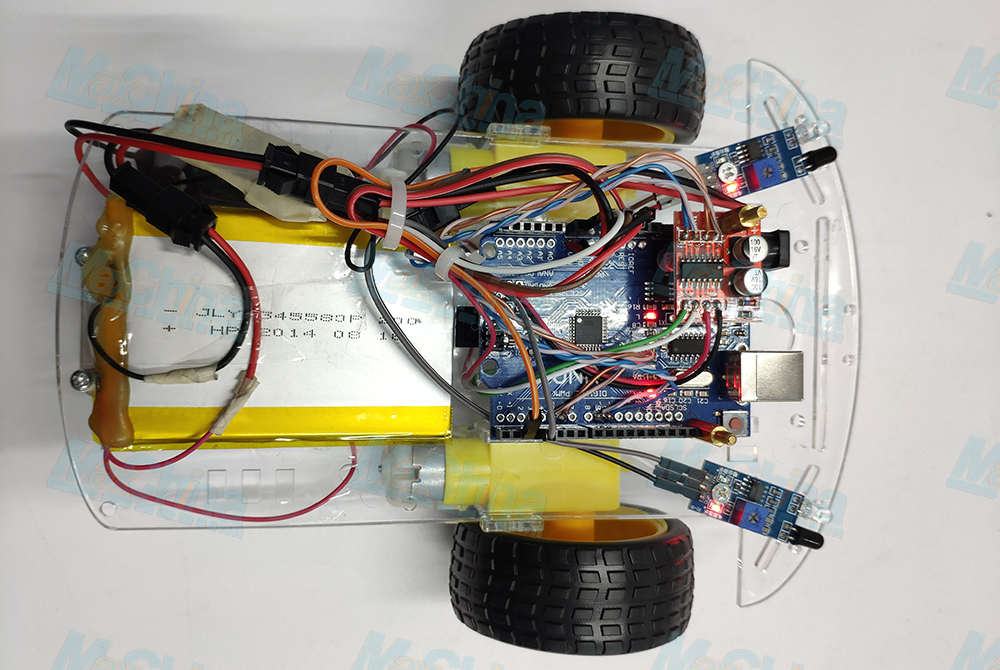
实物接线图
汽车前部左右两侧光电传感器的“OUT信号线分别连接Arduino 的2、3号IO,光电传感器VCC”、“GND”则与Arduino “5V”与“GND”相连。
两个电机分别接到电机驱动模块的”MOTOR A”、“MOTOR B”,电机驱动模块对应的“IN1”、“IN2”、“IN3”、“IN4”引脚接到Arduino5、6、9、10号IO,每两个IO控制电机的正反转;另外两个锂电池分别给出电机驱动模块跟Arduino开发板供电。
程序框图
程序是通过程序是通过Arduino Compatible Compiler For LabVIEW工具包直接编译下载Arduino在开发板上。主要编程思路如下:
第1部分通过For循环初始化2、3、5、6、9、10号IO;
第2部分靠2、3号IO读取的数据判断是否有障碍物:如果两侧没有障碍物,汽车将向前移动;如果右侧有障碍物,汽车将向左转,如果左侧有障碍物,汽车将向右转;如果两侧都有障碍物,汽车将转弯;
第3部分设定小车转向的时间:如果没有障碍物,汽车将继续前进;如果汽车左右有障碍物,汽车转向时间设定为150ms;如果两侧都有障碍物,小车转向的时间设定为500ms(达到调头效果)。
以上是今天的内容,我是Shania~随缘更新,有缘再见!
写于:19.03.29