第6章 实战项目篇
6.1 无线遥控智能汽车
6.1.1 概述
智能汽车是一种以轮子为移动机构,实现自主驾驶的机器人,又称轮式机器人。可应用于不适合人类工作的环境,如灾难救援、户外探险等。智能汽车不同于遥控汽车,因为后者需要操作人员控制其转向、启动、停止、前进和后退,以及控制其速度。常见的模型车属于这种遥控车。智能汽车可以通过计算机编程控制驾驶方向、启停和速度,无需人工干预,也可以通过修改智能汽车程序来改变驾驶模式。
智能汽车的典型特点是:1)至少有一个微控制器,通过微控制器控制驾驶方向、启停和速度;2)传感器具有多种功能,以获得外部环境,以便控制器做出准确的决策。
本节将以介绍为基础Arduino与LabVIEW无线遥控智能车,可实现自主(巡线和避障)和遥控两种功能,并可在两种功能之间切换。采用智能车Arduino上位机软件作为控制控制核心LabVIEW 2012,两者通过APC220无线数传模块实现无线通信。无线遥控智能汽车总体框图如图6-1所示。
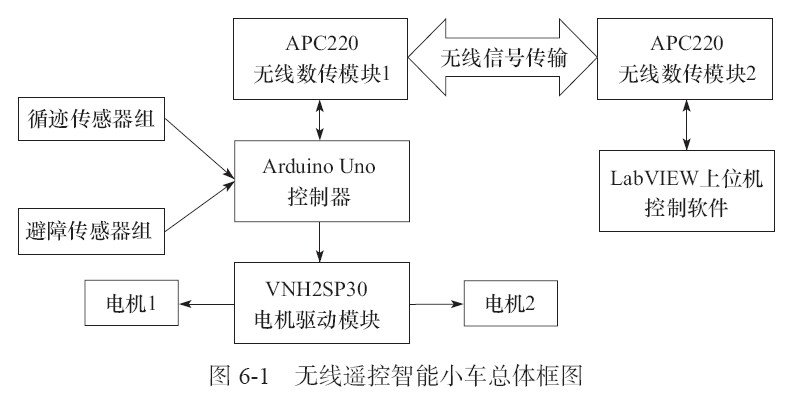
智能汽车车身采用两个驱动轮和一个通用轮的三轮汽车模型,驱动电机采用直流减速电机,电机驱动模块采用VNH2SP跟踪传感器采用30模块OPENJUMPER红外巡线传感器OJ-C