目录
-
- 摘要
- 1 介绍
- 2 背景
- 3 视觉误差分析和自主完整性监测
-
- 3.1 视觉误差分析
-
- 3.1.1 不足的特征
- 3.1.2 照明导致特征跟踪失败
- 3.1.3 特征分布不均匀
- 3.1.4 运动特征
- 3.2 PDR辅助视觉完整性监测
- 4 实验与评估
-
- 4.1 评估环境影响
-
- 4.1.1 缺少特征
- 4.1.2 照明导致特征跟踪失败
- 4.1.3 特征分布不均匀
- 4.1.4 移动特征点
- 4.2 建议的PDR评估辅助视觉完整性监测
-
- 4.2.1 A段
- 4.2.2 B段
- 4.2.3 C段
- 5 总结和讨论
- 参考文献
摘要
视觉惯性里程计(VIOs)由于相机的通用性和便利性,在室内定位领域越来越受到重视。然而,VIO视觉观测更容易受到环境的影响,观测误差影响最终定位精度。针对这一问题,我们分析了视觉观测误差的原因及其对定位精度的影响。利用短时可靠性计算行人航迹(PDR)新助视觉完整性监测和减少定位误差的新方法。该方法通过VIO和PDR选择最佳定位进行输出自动切换。提出的实验PDR测试和评估辅助视觉完整性监测。传感器实验套件包括双目相机和惯性测量单元(IMU)。结果表明,该系统在光照低、背景纹理信息少或运动目标少的环境下具有良好的室内定位性能。
1 介绍
在现代社会,人们越来越依赖定位服务。越来越迫切需要提供准确的室内定位服务。Wi-Fi、基于不同类型传感器的室内定位技术,如蓝牙、相机、惯性传感器等。由于相机传感器能提供丰富的环境视觉信息,且相机易于获取,因此基于视觉的室内定位技术越来越受到关注。根据相机的工作模式,可分为单目、双目和RGB-D。单目相机只有一个摄像头,具有结构简单、成本低的优点,但规模不确定。双目相机和RGB-D相机的目的是克服单目模式无法确定距离的缺点。双目相机由两个相机组成。我们可以用两个相头之间的距离来估计每个像素的空间位置,这与人眼非常相似。RGB-D相机通过物理测量获得深度信息,比双目相机节省了大量的计算量。然而,RGB-D相机噪音大,视野小,容易暴露在阳光下,不能测量透明材料。因此,我们选择双目相机作为基于视觉的室内定位系统的传感器。
基于视觉的室内定位技术可分为视觉里程计(VO)视觉惯性里程计(VIO)。VO相机的运动是根据捕获图像中的特征来估计的。VIO系统结构包括前端和后端两个主要部件。前端将传感器数据抽象成便于估计的模型,而后端则对前端产生的抽象数据进行位置估计。根据前端是否需要提取特征,VO可分为特征点法和直接法。主流视觉里程计是基于特征方法的前端,如ORB-SLAM、S-PTAM。然而,VO动态障碍物难以处理,易受环境影响。惯性测量单元(IMU)通过接收运动信息来减少动态物体的影响。虽然IMU角速度和加速度可以测量,但这些测量有明显的漂移,这使得IMU获得两分的位置非常不可靠。相机数据可以有效地估计和校正IMU漂移。虽然由于视线中的动态障碍和漂移积累,相机和惯性传感器的使用具有挑战性,但这两种传感器的集成可以弥补其缺点,提供更准确的定位解决方案。VIO基于IMU和相机之间的互补性,为室内定位服务提供了可靠的选择。参考文献[17]提出了一种带有可穿戴相头和惯性传感器的行人定位系统。通过图像匹配法对累积误差进行相对位移,并通过图像匹配法纠正累积误差。Li等人[18]提出使用相机和IMU移动设备上的3D跟踪和重建系统。根据不同的位置估计方法,VIO可分为两类:滤波估计方法和基于优化的估计方法。经典的滤波器VIO包括卡尔曼滤波器的多状态约束(MSCKF)和鲁棒视觉惯性里程计(ROVIO)。一种基于优化方法的方法VIO视觉惯性状态估计器(VINS)。
基于视觉的定位系统非常容易受到环境影响。影响定位精度的关键因素是能够提取稳定准确的视觉观察信息。当视觉观察(图像特征)很少或分布不均匀时,基于视觉的定位系统会有很大的定位误差,甚至导致系统崩溃。Alexander[22]提出了一种整合IMU克服这些视觉观测问题的有效方法。本工作利用IMU通过假设恒定速度来预测运动,获得相机的初始猜测。Tashfeen[23]基于扩展卡尔曼滤波(EKF)松散耦合三维惯性传感器系统和VO集成方案。然而,EKF视觉观察的质量取决于估计结果。一些研究更注重系统和算法的鲁棒性,而不是量化和可验证的完整性,特别是基于特征的处理。Veth[25]时序图像帧之间的特征引入了区域边界的概念,并增加了一些独特的特征标准,以提供一些保护,避免相应的特征错误。Koch[26]和Kyriakoulis[27]专注于使用额外的视觉测量,如颜色。然而,这些方法只提高了视觉观察的质量,并没有解决视觉观察稀缺的问题。
行人航迹计算(PDR)该系统包含加速度计和陀螺仪的数据,可在室内惯性导航系统中提供相对定位信息、速度和方向。Jimenez使用IMU广泛研究行人航迹计算算法。Lee在考虑转向和握手事件的影响下,提出了基于识别六种姿势和四种模式的结构化环境PDR为了减少航向误差,室内定位实验方法。但在长期运行中,PDR会产生积累误差,导致定位结果不可靠。Yan提出了一种融合VO和PDR匹配方法VO和PDR惯性定位校准用于定位信息的长时间步骤。在视觉观测质量差的情况下,这种融合匹配方法仍然保留了由视觉误差引起的定位误差。Dae在全球导航卫星系统中引入了一种选择性的组合方法(GNSS)应用于多个导航传感器,以提高定位精度。只衡量特征点几何分布的性能指标是通过加权最小二乘法推导出来的。该方法不考虑特征点稀疏和移动。
本文分析了视觉定位系统在特定环境下定位误差较大时的误差源,分为四种情况。基于视觉观测的行人航迹计算系统提出了自主完整性监测。根据PDR当视觉观察不可靠时,短期可靠的特点,PDR可输出定位结果。实验结果表明,我们的定位系统在纹理较少、动态障碍或光照较低的室内环境中具有较强的鲁棒性。本研究的主要贡献如下:
- 我们分析了误差的来源,并将其分为四种不同的误差,即在特定的室内环境中,当纹理较少、动态障碍较少、光线较弱时,视觉定位系统的定位误差较大。
- 基于视觉观基于视觉观测的行人航迹计算系统的独立完整性监测。PDR具有短期可靠性的特点,提出了一种PDR辅助视觉完整性监控系统在室内环境中自动切换VIO(或VO)和PDR提供更准确的位置。
2 背景
视觉惯性里程计通常由前端和后端组成。前端主要处理特征提取、特征跟踪、特征筛选等传感器的观测信息IMU预积分处理,图像和IMU数据组合等。后端主要通过滤波器或优化方案来估计前端产生的抽象数据的位置。系统结构框图如图1所示。 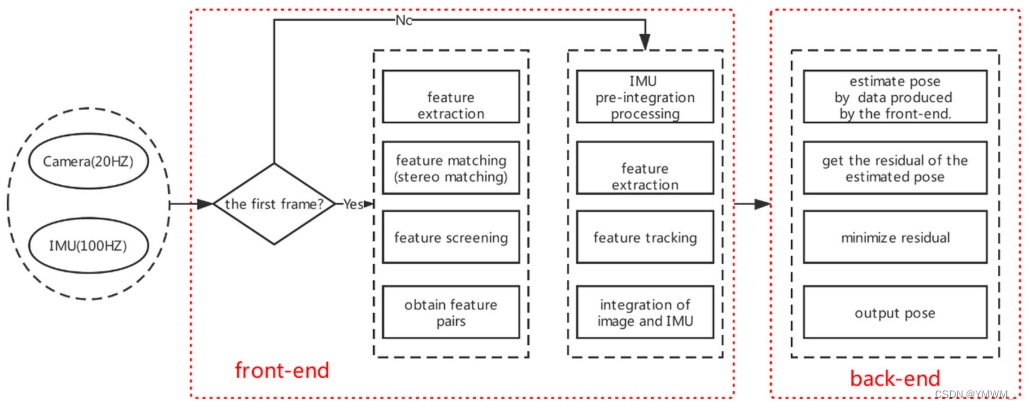
?
后端的目标是全球参考系 { G } \{G\} { G}估计相机系 { C } \{C\} { C}的三维姿态。由于一个双目相机由两个镜头组成,相机系用 { C k , k = 1 o r 2 } \{C_k,\ k = 1\ or\ 2\} { Ck, k=1 or 2}表示。为了更清晰、更简单地分析视觉观测对位姿估计的影响,我们定义了定位系统的状态向量和观测向量。视觉惯性里程计在 k k k时刻的状态向量 X k X_k Xk如公式(1)中所示,包括了IMU的状态 X I M U k X_{IMU_k} XIMUk和相机的位姿(姿态为 G C k q ˉ _G^{C_k}\bar{q} GCkqˉ和位置 G p C k ^Gp_{C_k} GpCk)。 X k = [ X I M U k T G C k q ˉ T G p C k T ] T , w h e r e X I M U = [ G I M U q ˉ T b g T G v T b a T G p T ] T (1) X_k=[X_{IMU_k}^T\ \ _G^{C_k}\bar{q}^T \ \ ^Gp_{C_k}^T]^T, \ \ where\ X_{IMU}=[^{IMU}_G\bar{q}^T \ \ b_g^T \ \ ^Gv^T \ \ b_a^T \ \ ^Gp^T]^T \tag{1} Xk=[XIMUkT GCkqˉT GpCkT]T, where XIMU=[GIMUqˉT bgT GvT baT GpT]T(1) 其中 G I M U q ˉ T _G^{IMU}\bar{q}^T GIMUqˉT是从坐标系 { G } \{G\} { G}到坐标系 { I M U } \{IMU\} { IMU}的旋转; G v ^Gv Gv和 G p ^Gp Gp是IMU相对于坐标系 { G } \{G\} { G}的位置和速度; b g b_g bg和 b a b_a ba是陀螺仪和加速度计测量的偏差。
第 k k k次相机测量包含了第 k k k次相机位姿 ( G C k q ˉ , G p C k ) (^{C_k}_G\bar{q},\ ^Gp_{C_k}) (GCkqˉ, GpCk)所观察到的一系列特征点。特征点 z i z_i zi的测量模型用如下公式表示: z i = 1 C Z i [ C X i C Y i ] + n i , i ∈ f , C ∈ { C 1 , C 2 } (2) z_i=\frac{1}{^CZ_i}\begin{bmatrix} ^CX_i \\ ^CY_i \end{bmatrix} + n_i, \ \ i \in f,C\ \ \in \{C_1,C_2\} \tag{2} zi=CZi1[CXiCYi]+ni, i∈f,C ∈{ C1,C2}(2) 其中 f f f表示所有特征点的集合; C 1 C_1 C1和 C 2 C_2 C2分别表示左右相机; n i n_i ni表示 2 × 1 2\times 1 2×1的图像噪声向量。特征位置在相机系的坐标, C p i ^Cp_i Cpi,如下所示: C p i = [ C X i C Y i C Z i ] = C ( G C i q ˉ ) ( G p i − G p c ) (3) ^Cp_i=\begin{bmatrix} ^CX_i \\ ^CY_i \\ ^CZ_i \end{bmatrix}=C(^{C_i}_G\bar{q})(^Gp_i-^Gp_c) \tag{3} Cpi=⎣⎡ 标签: 11a输出传感器gv传感器8b型高稳定性传感器