传感器及其应用技术
- 前言
- 简答题
-
- 0. 绪论
- 1.测量 频率、时间和相位
-
- 1.1 频率/周期的数字测量
- 1.2 时间间隔和相位数字测量
- 2. 阻抗测量
-
- 2.1 交流电桥
- 2.二 直流不平衡电桥
- 2.3 有源电桥
- 2.4 差动脉冲调宽法(差动电容、差动电感)
- 3. 阻抗传感器
-
- *3.0 三种阻抗传感器的原理
- 3.1 电阻式应变传感器
- 3.2 电感传感器
- 4. 电压传感器
-
- *4.0 四种电压传感器的原理
- 4.1 压电传感器等效电路
- 4.2 电荷放大器
- 4.3 热电偶传感器
- 4.4 霍尔传感器的工作原理
- 5. 光电传感器
-
- *5. 四种光电传感器的原理
- 5.1 外光电效应
- 5.2 光电倍增管
- 5.3 光导纤维的结构和导光原理
- 5.4 CCD 图像传感器的工作原理
- 5.5 斯特藩 - 玻尔兹曼定律,维恩位移定律
- 6. 数字传感器
-
- 6.1 二进制与格雷码的相互转换
- 6.2 编码器
- 6.3 长光栅传感器的工作原理电阻电桥细分法
- 6.4 感应同步器的结构及其工作原理
- 6.5 文氏电桥的结构及其工作原理
- 7. 热工量电测法
-
- *7.0 三种电测方法
- 7.1 皮托管的工作原理
- 7.2 流量-差压转换法
- 7.3 涡街流量计
- 综合题
-
- 1. 频率、时间和相位的测量
-
- 1.1 频率/周期的数字测量
- 1.2 时间间隔和相位数字测量
- 2. 阻抗的测量
-
- 2.1 无源电桥
- 3. 阻抗传感器
-
- 3.1 电容式传感器
- 4. 电压传感器
-
- 4.1 霍尔传感器
- 5. 阻抗传感器
-
- 5.1 自感传感器
- 5.2 变间隙和变介电常数电容式传感器
- 6. 数字传感器
-
- 6.1 长光栅传感器和电阻电桥细分法
- 最后
前言
简答题
0. 绪论
- :
输出静态函数关系(线性、奇函数、偶函数)线性度(校准曲线与拟合直线的偏差)分辨力(最小输入增量)和阈值(零点附近的分辨力),灵敏度(输出变化量与输入变化量的比例-常数),迟滞和重复、时漂(温度和输入恒定下,输出在较长时间的变化)及温漂(输入恒定,输出随温度变化);
1.测量 频率、时间和相位
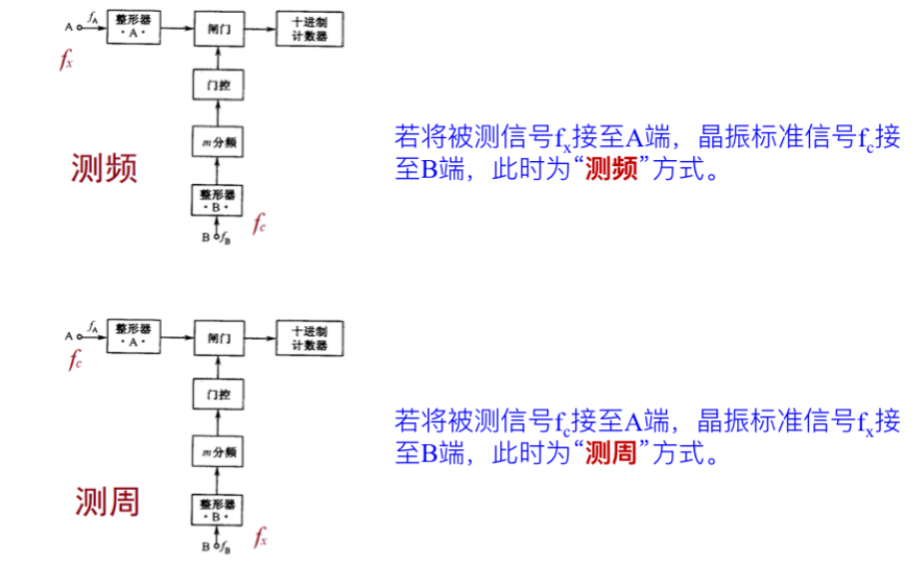
频率测量分为:和; 其中频率的模拟测量有:电桥法、谐振法、频率-电压转换法; 以下为计数法;
1.1 频率/周期的数字测量
-
: 在一定时间间隔T 内,计算周期性脉冲的重复次数。如果周期性脉冲的周期是 TA,计数结果为 N=T/TA;
-
:
-
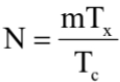
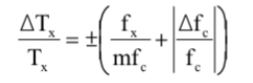
:(fc-标准频率;左边-最大相对误差;绝对值-准确性;m-分频)


- :(fc-标准频率;左边-最大相对误差;绝对值-准确性;m-分频)
1.2 时间间隔和相位数字测量
- :

- :
- :(频率相同,相位差为 φx)
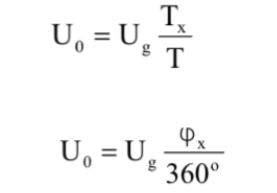
- :(时标脉冲周期-Tc,N-计数值)
- :(频率相同,相位差为 φx)
2. 阻抗测量
:理想下仅有实部。高频下虚部不能忽视。 :理想下仅有虚部。随频率增大损耗增大。Zc = RC(ω) + 1/jωC。电流超前电压 90; :理想下仅有虚部。频率接近磁性材料截止频率时损耗大。Zl = RL(ω)+ jωL。电流落后电压 90;
2.1 交流电桥

- 电桥平衡时:U0 = 0;Z1Z3 = Z2Z4;
- 损耗:
- :
损耗因子 tanδ:施电压时功功率与功功率之比。无损耗时为 90;有损耗时为 90-δ;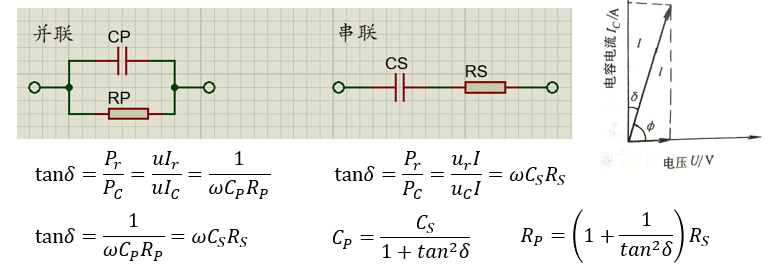
- :
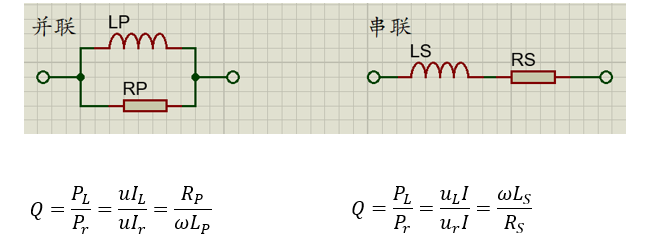
品质因数 Q:施电压时功功率与功功率之比。
- :
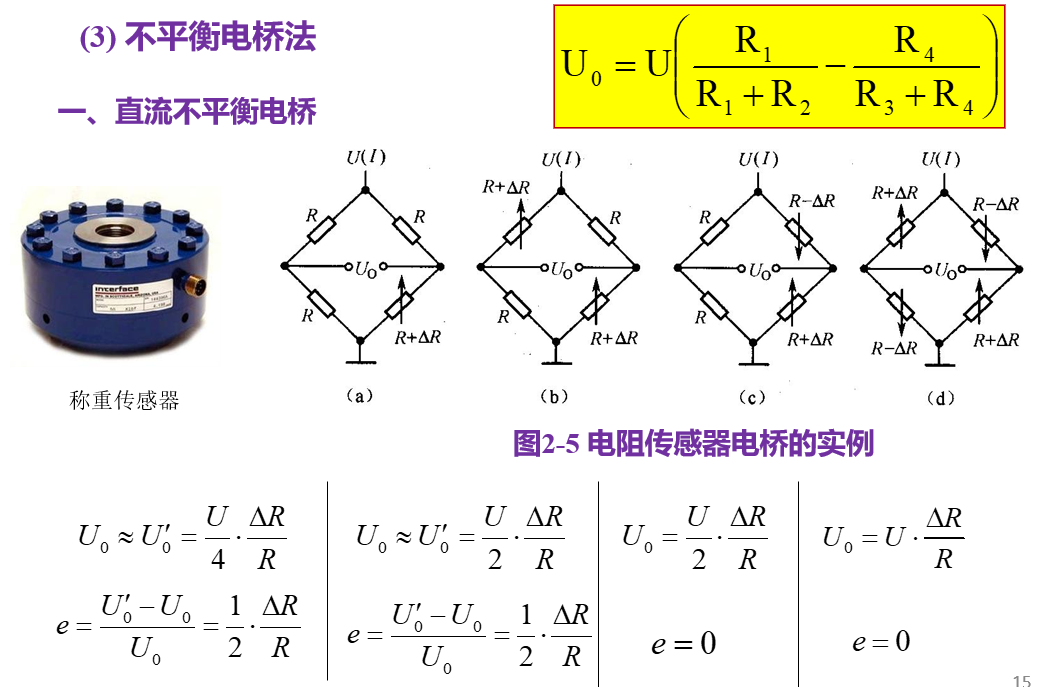
2.2 直流不平衡电桥
2.3 有源电桥
- 注意虚短虚断;
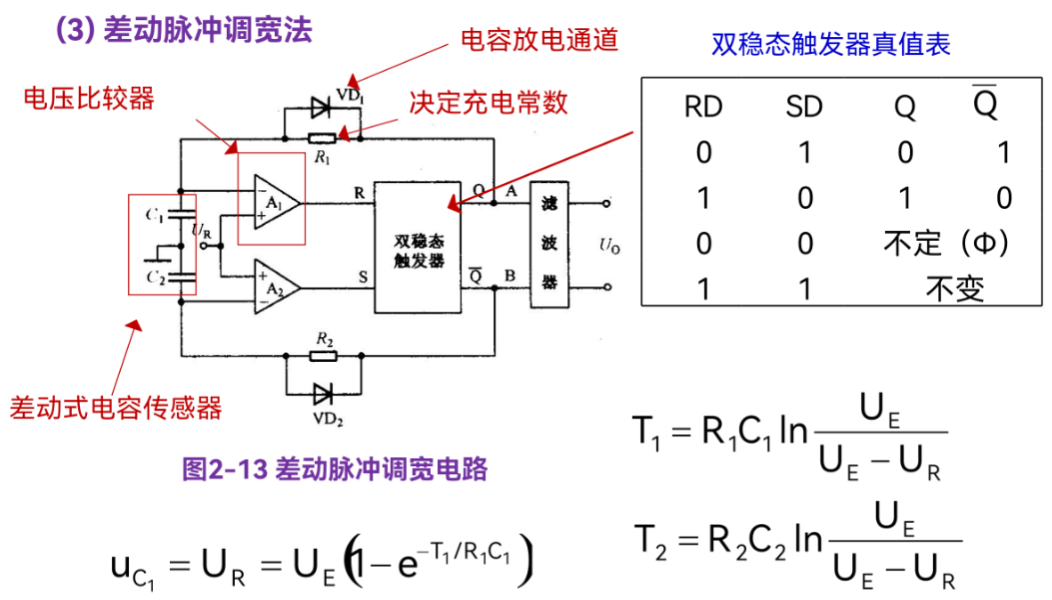
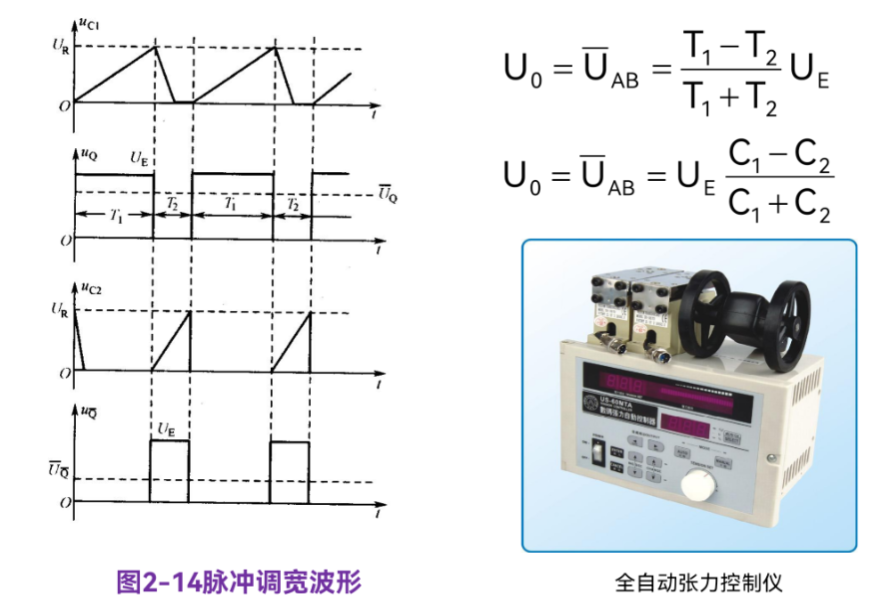
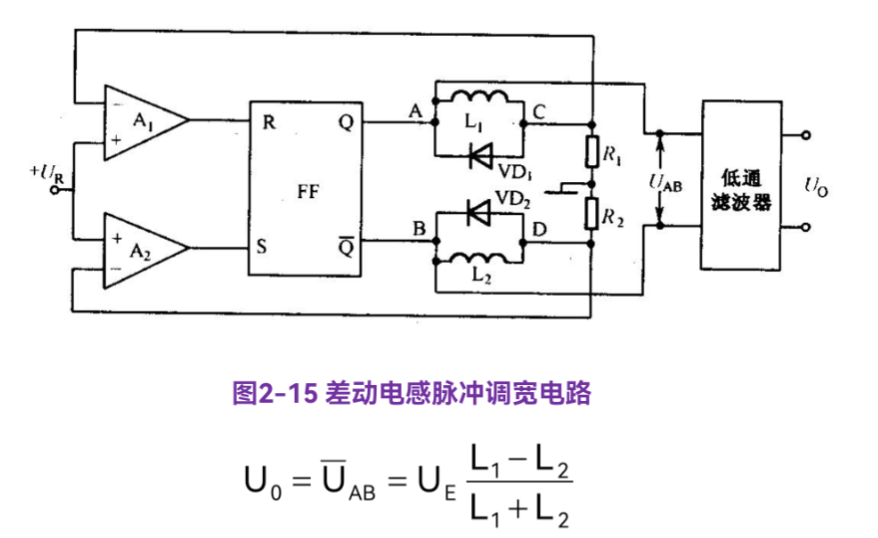
2.4 差动脉冲调宽法(差动电容、差动电感)
3. 阻抗型传感器
分为:电阻式传感器、电容式传感器、电感式传感器(自感、互感、压磁、电涡流);
*3.0 三种阻抗型传感器原理
- :导体或半导体材料在受到外界力作用时,产生机械形变,机械形变导致阻值变化(有电位器式、应变式和压阻式)【温度湿度传感器、压拉力传感器】;
- :把被测的机械量,如位移、压力等转换为电容量变化的传感器(改变间隙、面积和介质);【触摸感应开关、压拉力传感器】
- :被测量的变化引起线圈自感或互感系数的变化(分自感和互感两类,有变间隙型、变面积型和螺管型三种类型)【震动检测、位移测量、微位移测量】;
- :有三种。变间隙型、变面积型和螺管型;
- :主要差动变压器。衔铁、一次绕组和二次绕组;
- :正磁致伸缩材料在受到拉应力作用时,在拉应力方向上磁导率会增大,在垂直拉应力方向上磁导率会减小;
- :通过金属体的磁通变化,在导体中产生感生电流(自行闭合),使产生磁场的线圈阻抗发生变化 【金属探测】;
3.1 电阻式应变传感器
- :电位器式传感器、应变式传感器、压阻式传感器(单晶硅受力电阻率变化);
- :导体或半导体材料在受到外界力作用时,产生机械形变,机械形变导致阻值变化;


3.2 电感式传感器
-
:被测量的变化引起线圈自感或互感系数的变化(分自感和互感两类);
-
:有三种。变间隙型、变面积型和螺管型;
-
:主要一种。差动变压器;
-
:
- 电感 [N线圈匝数,Rm磁路总磁阻]: L = N 2 R m L = \frac{N^2}{R_m} L=RmN2
- 磁路总磁阻 [l1铁心磁路长,l2衔铁磁路长,A截面积,µ1铁心磁导率,µ2衔铁磁导率,µ0空气磁导率,δ空气隙厚度]: R m = l 1 μ 1 A + l 2 μ 2 A + 2 δ μ 0 A R_m=\frac{l_1}{μ_1A} + \frac{l_2}{μ_2A} + \frac{2δ}{μ_0A} Rm=μ1Al1+μ2Al2+μ0A2δ
- 一般情况下,有: L = N 2 μ 0 A 2 δ L=\frac{N^2μ_0A}{2δ} L=2δN2μ0A
-
:
- 气隙长度不变,铁心与衔铁之间相对而言重迭面积随被测量的变化而改变;
L = N 2 μ 0 A 2 δ L=\frac{N^2μ_0A}{2δ} L=2δN2μ0A
- :
- 线圈电感量的大小与衔铁插入线圈的深度有关;
- [线圈长度l、线圈的平均半径r、线圈的匝数N、衔铁进入线圈的长度la、衔铁的半径为ra、铁心的有效磁导率为µm]
L = 4 π 2 N 2 l 2 [ l r 2 + ( μ m − 1 ) l a r a 2 ] L=\frac{4π^2N^2}{l^2}[lr^2+(μ_m-1)l_ar^2_a] L=l24π