
简 介: 本文设计的智能车系统LPC54606J基于512微控制器的核心控制单元MT9V034摄像头图像采样获取轨道图像信息,提取轨道中心线,计算车辆与黑线之间的位置偏差PD方法反馈控制舵机转向。PID控制算法调整驱动电机的速度,分析前方轨道信息,实现模型车运动速度的闭环控制。OPEN ART mini模块识别动物、水果、数字AprilTag并采用串口通信实现码。LPC54606J512微控制器与OPEN ART mini该模块的信息交换。为了提高模型车辆的速度和稳定性,采用虚拟示波器、蓝牙串口模块、蜂鸣器模块、按键液晶模块、拨码开关等调试工具,证明系统设计方案确实可行。 : ,,,,,
第一章 引 言
??本文以第十六届全国大学生智能汽车竞赛为背景。本次比赛是教育部高等教育部委托高等学校自动化教学指导委员会自2006年以来举办的一场旨在加强学生实践、创新能力和培养团队精神的创意技术竞赛。以以培训为基础,注重参与,鼓励探索,追求卓越为指导思想。希望通过竞争加强大学生的创新意识、合作精神和实践能力。进一步促进高等学校加强学生创新精神、合作精神和工程实践能力的培养,提高学生解决实际问题的能力,充分利用大学生群众科技活动,为优秀人才的脱颖而出创造条件,不断提高人才培训质量。
??本次比赛融合了科学、兴趣和装饰,是一场以快速发展、广阔前景的汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械、汽车等多学科专业的创意竞赛。比赛规则透明,评价标准客观,坚持开放、公平、公正的原则,确保比赛健康、普及、可持续发展。
??本次比赛,本组采用恩智浦公司生产的竞赛组委会提供的竞赛车模型LPC54606J512作为核心控制单元,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、舵机控制等,最终实现一套能够自主识别路线,并且可以实时输出车体状态的智能车控制硬件系统。
??在本技术报告中,详细介绍了智能汽车系统的软硬件结构、设计开发过程和创新。在整个过程中,培养了电路设计、软件编程、系统调试等方面的能力,锻炼了知识整合、实践和创新的能力,对未来的学习和工作产生了积极的影响。
第二章 系统总体设计
2.1系统分析
??该系统以LPC54606J512用作系统控制处理器CMOS相机获取轨道图像信息PD方法反馈控制舵机转向,采用电机转速控制PID控制。虽然这个组是一个赛车组,但它不同于传统的四轮赛车组,因为它需要识别动物、水果和其他元素。因此,在确保识别所有元素的前提下,不再追求单一的速度,而是追求系统的稳定性。UART通信实现LPC54606J512与OPEN ART mini视觉模块的通信。LPC54606J512是核心,所以通信在开始时是关闭的,只有在特定的元素中才能打开通信。 系统总体方案设计图:
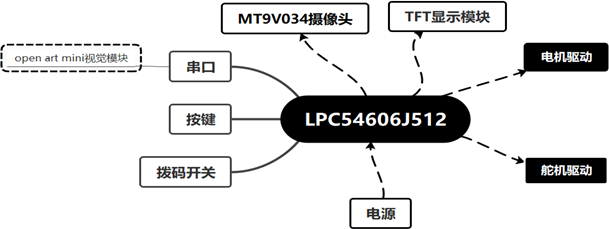
▲ 图2.1系统整体框架 2.2车模整体布局
(1)为保证整车质量尽可能轻,整车配件最小最轻。 (2)主板电池低位放置,以降低赛车重心。 (3)摄像头支架采用高强度轻质碳杆。 (4)确保动物和水果的检测,OPEN ART mini放在车前高度10cm激光笔放置在高度15左右cm处。 以下图为整车的详细布局:
??图2.2.3车模侧视图 ??2.3本章小结 车模的机械结构是车模的基础,在一定程度上影响车模的速度上限。因此,良好的机械结构是成功的前提。机械安装、重心位置、传感器位置都是成功的一部分。在组装模具时,应考虑任何可能影响模具稳定性的原因。使模具不仅稳定性高,而且看起来更漂亮。 第三章 系统机械设计和实现 ??3.1编码器安装 本组采用龙邱512线迷你编码器,因为该编码器小巧轻便,与正交解码兼容,性价比高。安装原则是不要太紧或太松。当齿轮咬合过紧时,电机旋转会有很大的声音,也会增加旋转阻力。如果安装过松,很容易损坏齿轮。安装完成后,用手旋转轮胎,感觉一侧旋转阻力是否大,另一侧旋转阻力是否小。如果有,请重新安装。直到旋转非常平稳,噪音很小,让电机空转,听是否有卡齿轮。在确保没有这些情况时,在齿轮之间涂抹润滑油,并慢慢旋转轮胎,使润滑油均匀地涂抹在电机齿轮和编码器齿轮之间。这样,当模型在轨道上运行时,声音非常小,速度测量将更准确。安装如下:
??图3.1编码器安装 ??3.2舵机安装 目前舵机主要安装卧式和立式,C�