本系列博客包括自动驾驶技术概述、自动驾驶汽车平台技术基础、自动驾驶汽车定位技术、自动驾驶汽车环境感知、自动驾驶汽车决策与控制、自动驾驶系统设计与应用六个栏目。作者不是自动驾驶领域的专家,只是一个探索自动驾驶道路的小白人。这个系列还没有读完,也是一边读一边总结一边思考。欢迎各位朋友,各位大牛在评论区给出建议,帮笔者这个小白挑错,谢谢! 本专栏是关于自动驾驶汽车环境感知的笔记.
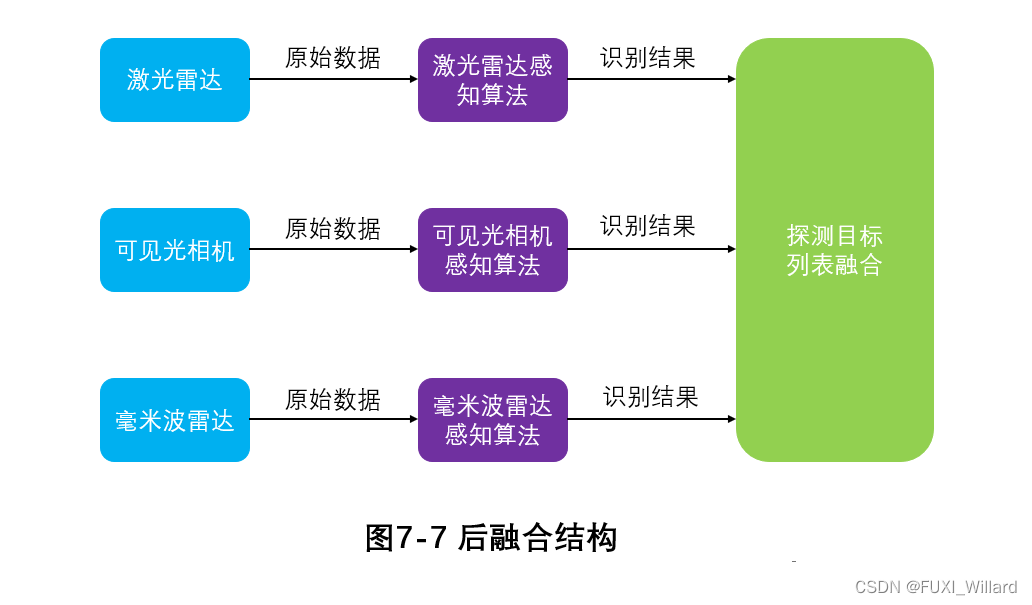
2.多传感器后融合技术
2.1 Ulm自动驾驶:模块化集成方法
上图说明:
- ;
- ;
- ;
该算法提出了分层模块化环境感知系统(HMEP),它包括网格映射、定位和目标跟踪三个感知层;
- 滤波器更新测量网格的网格映射,并将多传感器数据集成到网格映射层中。
2.2 FOP-MOC模型