本系列博客包括自动驾驶技术概述、自动驾驶汽车平台技术基础、自动驾驶汽车定位技术、自动驾驶汽车环境感知、自动驾驶汽车决策与控制、自动驾驶系统设计与应用六个栏目。 本专栏是关于自动驾驶汽车定位技术的笔记.
4.车联网辅助定位技术
4.1 收集和发布车联网辅助地图数据
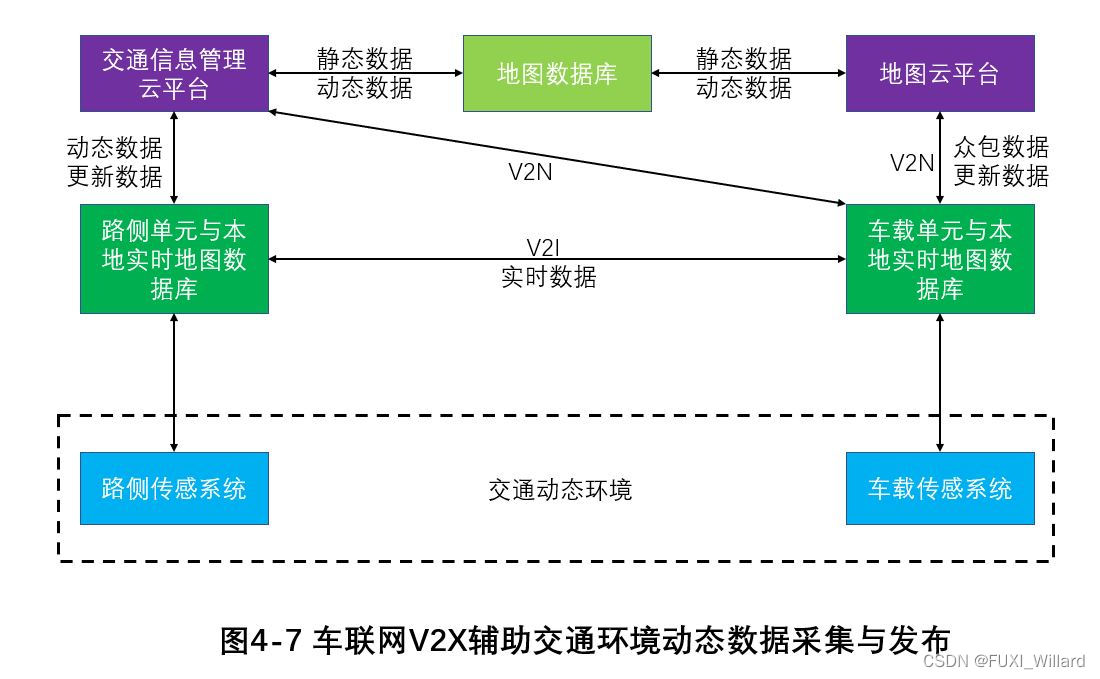
- 高精度地图数据主要包括:反映道路基础设施静态数据、反映交通运行(交通标志、交通控制、交通状况、道路性能、道路气象等)。准动态数据和反映道路目标(道路拥堵、施工、交通事故、交通控制、天气等动态交通信息)的高动态数据;
- 准动态交通运行数据和高动态道路目标数据是实现高精度定位、辅助环境感知、规划和决策功能的必要条件,动态数据可以通过车辆网络收集、发布和共享;
4.1.1 收集和发布车联网辅助动态地图数据
- 准动态地图数据主要包括道路性能、道路气象、临时交通标志、交通控制等交通相关数据,更新频率为秒或分钟;
- 交通信息管理云平台和地图云平台是准动态地图数据收集和发布的主体;
- 交通信息管理平台收集的数据包括:交通状况、道路性能、道路气象、临时交通标志、交通控制等交通管理数据;
- 地图云平台收集的数据包括交通状况、道路性能和识别的交通状况、道路性能和道路气象;
- 准动态地图数据的发布主要通过基于蜂窝移动通信的车联网技术为汽车提供更准确的准动态地图数据支持,更新车载高精度地图动态数据,进一步协助自动驾驶定位;
4.1.2 收集和发布车联网辅助高动态数据
- 高动态数据主要是实时道路目标数据,包括:汽车位置、汽车驾驶状态和行人信息,存储在车载单元创建的实时汽车环境感知地图中;
- 高动态数据可以通过车载传感器收集道路目标或通过V2X收集实时交通动态环境数据;
- 每辆车都可以通过V2X通过广播通知周围汽车的位置、状态、操作数据和方式,车辆单元的动态地图不断更新周围汽车的位置和行人位置,并通过SLAM通过整合,可以创建实时更新的汽车环境感知地图,辅助自动驾驶汽车定位;
4.2 室内定位技术
4.2.1 室内定位技术原理
标签法、指纹定位法、距离交叉定位法、航迹计算等;
-
参考标签法
参考标签法:在指定场景中以某种方式安排定位参考标签,提前将标签的位置和标签记录到阅读器的接收信号强度指示(Received Signal Strength Indication,RSSI)值;
当阅读器读取目标标签时RSSI值并参考标签RSSI比较值,选择目标标签RSSI从而估计目标标签的位置,实现室内目标的定位;
-
指纹定位法
指纹定位法:指接收到的待定位目标信息值与已建立的信息库匹配,以确定待定位目标的位置;
该定位方法通常包括:离线采集和定位两个阶段;首先,离线采集阶段是通过实际采集或计算分析建立指纹地图或指纹数据库;然后,定位阶段通过将实时接收到的数据特征与指纹信息库中的特征参数进行对比,进而找到最好的匹配参数,使待定位目标对应的位置坐标即被认为是待定位目标点的位置;
-
距离交会定位法
距离交互定位法:通过测量流动站到至少三个已知参考点的距离,进而确定流动站的位置; { ( X 1 ? X a ) 2 ( Y 1 ? Y a ) 2 ( Z 1 ? Z a ) 2 = d 1 a 2 ( X 2 ? X a ) 2 ( Y 2 ? Y a ) 2 ( Z 2 ? Z a ) 2 = d 2 a 2 ( X 3 ? X a ) 2 ( Y 3 ? Y a ) 2 ( Z 3 ? Z a ) 2 = d 3 a 2 (1) \begin{cases} &(X_1-X_a)^2 (Y_1-Y_a)^2 (Z_1-Z_a)^2=d_{1a}^2 \\ &(X_2-X_a)^2 (Y_2-Y_a)^2 (Z_2-Z_a)^2=d_{2a}^2 \\ &(X_3-X_a)^2 (Y_3-Y_a)^2 (Z_3-Z_a)^2=d_{3a}^2 \end{cases}\tag{1} ?????(X1−Xa)2+(Y1−Ya)2+(Z1−Za)2=d1a2(X2−Xa)2+(Y2−Ya)2+(Z2−Za)2=d2a2(X3−Xa)2+(Y3−Ya)2+(Z3−Za)2=d3a2(1) 流动站坐标为: ( X a , Y a , Z a ) (X_a,Y_a,Z_a) (Xa,Ya,Za),获取与三个已知参考点之间的距离及位置信息,其信息集合为: ( X 1 , Y 1 , Z 1 , d 1 a ) 、 ( X 2 , Y 2 , Z 2 , d 2 a ) 、 ( X 3 , Y 3 , Z 3 , d 3 a ) (X_1,Y_1,Z_1,d_{1a})、(X_2,Y_2,Z_2,d_{2a})、(X_3,Y_3,Z_3,d_{3a}) (X1,Y1,Z1,d1a)、(X2,Y2,Z2,d2a)、(X3,Y3,Z3,d3a),即可组成方程组求取流动站坐标;
距离交会定位方法基于不同的测距方式分为:基于RSSI、基于信号到达时间(Time Of Arrival,TOA)、基于信号到达时间差(Time Difference Of Arrival,TDOA)、基于信号到达角度(Angle Of Arrival,AOA);
-
RSSI测量
RSSI测量是通过推算信号在自由空间的传播损耗,可使用理论或经验模型将传播损耗转化为测量距离;
在自由空间中,距离发射机 d d d处的天线接收到的信号强度表示为: P R P T = G R G T λ 2 ( 4 π ) 2 d 2 L (2) \frac{P_R}{P_T}=\frac{G_RG_T\lambda^2}{(4\pi)^2d^2L}\tag{2} PTPR=(4π)2d2LGRGTλ2(2)
- P R P_R PR:距离 d d d处的天线接收功率;
- P T P_T PT:发射天线的信号功率;
- G R G_R GR:接收天线的增益;
- G T G_T GT:发射天线的增益;
- λ \lambda λ:信号波长;
- L ( L > 1 ) L(L>1) L(L>1):系统的损失;
-
TOA测量
TOA测量是测量信号在流动站和基站之间的单程传播时延或往返时间;
TOA测量属于多边定位方法,假设电磁波从流动站到基站的传播时延为 t t t,传播速度为 c c c,则该流动站位于以该基站为圆心、半径为 c t ct ct的圆上;以此类推,流动站也在第二个、第三个基站的圆上,故流动站的位置坐标为三个圆的交点; 其中: A 、 B 、 C A、B、C A、B、C是三个已知位置信息的基站, P P P为流动站, R 1 、 R 2 、 R 3 R_1、R_2、R_3 R1、R2、R3分别为流动站到基站 A 、 B 、 C A、B、C A、B、C的距离;
-
TDOA测量
TDOA测量是测量信号到达时间,但TDOA使用到达时间差进行定位计算,利用双曲线交点确定流动站位置,不需要基站和流动站的精确同步;通过TDOA测量,可以得到流动站和两个基站的距离之差,即流动站位于以两个基站为焦点的双曲线的交点,再引入第三个基站,可得到两个以上双曲线方程,则双曲线的交点即为流动站的位置; 其中: A 、 B 、 C A、B、C A、B、C为三个已知位置的基站, P P P为流动站, R 1 、 R 2 、 R 3 R_1、R_2、R_3 R1、R2、R3分别是流动站到基站 A 、 B 、 C A、B、C A、B、C的距离,其中 R 2 − R 1 、 R 3 − R 1 R_2-R_1、R_3-R_1 R2−R1、R3−R1为定值;
-
AOA测量
AOA测量是通过流动站的接收机的天线阵列
-