基于STM32F4.心电监护仪
-
- 一、硬件设计
- 二、GUI的设计
- 三、导联系统的选择
- 四、心电电极选择
- 五、心电信号时域和频域特征
- 六、软件设计
-
- 6.1.系统总体设计
- 6.2.系统总体设计
- 6.3.心电信号滤波
- 6.4、心率和QRS宽度检测
- 七、实机演示
- 八、总结展望
一、硬件设计
- 处理板的选择
本研究的处理器模块选择,如图1所示,最小系统板搭载STM32F407ZGT6芯片,并有 192KB的SRAM、1024KB的FLASH、定时器资源丰富(12个16位定时器,2个32位定时器)I/O口、2个DMA还有一个控制器FSMC接口,其中通过FSMC刷屏速度可达3300W像素/秒,此外,板材还扩大了1M字节的SRAM芯片更有利于处理器驱动4.3寸的LCD,这大大加快了心电监测器的刷屏速度,,而且最小系统板也会是FSMC接口和其他IO口一起引出。 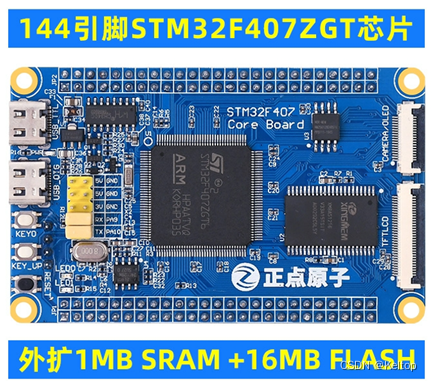
- 心电采集板—ADS1292R模块的介绍
本研究最重要的方法是心电采集板。心电信号采集板的芯片选择TI公司的ADS1292R,参考外围电路TI绘制公司给出的原理图和建议,如图所示。 关于ADS1292R的外围电路的介绍和使用,这里推荐这篇博文,ADS1292R的使用
- 温度模块----LMT70
采用温度检测模块LMT70温度传感器。其优点是:超小、高精度、低功耗的模拟温度传感器。缺点是:接触式温度传感器,测体表温度有一定误差。但考虑到温度测量的精度和方便性,最终选择LMT70作为温度测量传感器,同时选择ADS1118具有PGA、高精度电压基准,16位ADC对LMT70数据的温度模拟量进行采集。
- 没有屏幕的系统外观
二、GUI的设计
本系统为了更好的人机交互,采用4.3英寸触摸屏搭配开源图形库,一方面,将显示波形和数据与心电信号的收集和处理隔离开来,另一方面,系统运行界面如下图所示,便于交互和美观。整个界面主要包括。 通过系统菜单LVGL的roller绘制控件,roller内部选项的事件以回调函数的形式调用。因为选择roller的选项,LVGL会回到选项值,所以我自己设计了注册回调函数,并通过数组调用选定的序号。代码如下:
void (*oper_fuc[4])();//函数指针数组 void Menuitem_Init(void) {
oper_fuc[0]=send_type_server; oper_fuc[1]=Set_chart_div_line; oper_fuc[2]=clear_step; oper_fuc[3]=smooth_filter; } static void roller_event_handler(lv_obj_t * obj, lv_event_t event) {
static unsigned char count=0; if(event==LV_EVENT_VALUE_CHANGED) {
count=
lv_roller_get_selected
(obj
)
;
}
if
(event
==
LV_EVENT_CLICKED
)
{
oper_fuc
[count
]
(
)
;
}
}
是选中roller中的事件函数,在事件函数里面来回调选项的处理函数。roller中总共写了4个选项,分别为 send_type选择发送类型(支持发送到本地显示或者串口发送给上位机)、set_div_line是否设置图表的等分线、 clear_step清除界面上的数据、 smooth_filter是否进行平滑滤波 本系统还设计导联状态指示灯,前面讨论过ADS1292R可以检测电联的脱落状态,因而这里用LVGL的led控件作为导联的状态指示,当检测到导联接入人体,led控件就会点亮。设计了红心周期性跳动,当检测到导联接入人体后,红心就会周期性跳动,当心电数据采样开始后,红心随着心率值的改变而跳动着。同时还设计了采样开始/停止按钮,可以随时暂停和开始采样心电信号。 除了以上看得见的设计之外,还创建了四个周期性的任务,任务优先级从高到低分别为:
三、导联体系的选择
心电信号本质上是测量人体体表的电信号,将电极通过一定的导联体系就可以记录到心电图,因而选择合适的电极是观察心电图至关重要的选择。在医学上常见的导联体系分别为。标准12导联体系是医院所使用的,它由3个双极肢体导联、6个单极胸前导联、3个单极加压肢体导联所组成。 该系统的主要目的是实时检测心率和QRS宽度,因此选择的导联应该基于能观察心电中R波较大的原则。因而选择标准12导联中标准肢体导联I(见图左),或者Mason-Likar导联(见图右)。
四、心电电极选择
人体的内阻很高,因而心电信号是一个高内阻且幅度很低的信号,如果处理不好就会造成心电信号的衰减,因此就需要从两方面解决: (1)降低与电极的接触阻抗(2)提高采集电路的输入阻抗。 目前,市面上有三种电极,分别为,这三种电极中湿电极的接触电阻最小,因而对于模拟前端的输入电阻不需要太大。湿电极主要由电极片、Ag/AgCl 涂层、导电胶等物质组成。 医学电极贴片与身体接触的是水凝胶(亲水化合物),“黑色”部分为Ag/AgCl,使用导电金属和导线与仪器连接,实物如图所示。
五、心电信号时域和频域特征
人体的心电信号是一种非平稳、非线性、随机性比较强的微弱生理信号,幅值约为毫伏(mV)级,频率在0.05-100Hz之间。心电信号的每一个心跳循环由一系列有规律的波形组成,它们分别是P波、QRS复合波和T波,而这些波形的起点、终点、波峰、波谷、以及间期分别记录着心脏活动状态的详细信息 心电信号各个波段的详细说明如下: 心电各个波段的功率谱如下: 心电信号的噪声分析如下: 读者想对心电信号进一步了解可以参考如下链接:http://www.mythbird.com/ecgxin-hao-te-zheng/。
六、软件设计
6.1、系统总体设计
系统先从硬件初始化开始,其中包括 其次就是LVGL初始化,主要是一些主题和变量的初始化。然后创建系统的UI界面和一些定时的任务。 最后初始化 完成以上的初始化,系统便进入主循环,等待心电数据输入缓存中出现数据,随后开始滤波,将滤波之后的数据写入心电输出缓存中,然后轮询LVGL的任务和触摸屏扫描。就这样不停地循环。其中心电输入缓存中的数据是通过中断从ADS1292R的输出引脚中读取,而心电输出缓存则是原始数据经过低通处理后的数据,等待LVGL显示任务的到来并显示在触摸屏上。系统总体框图和软件框图如下所示
6.2、系统总体设计
在前面讨论过心电信号频谱和噪声,因而要对心电信号进行滤波,为了同时实现心电信号的实时滤波和心电波形实时显示,所以有必要设计一个缓存区来解决这个难题。这里我打算用我自己设计的两个循环队列解决这个难题。 为了使得在滤波的时候,心电数据依然能够采集,设计两个循环队列,如上图所示,其中IN_Buffer和OUT_Buffer的每个矩形框表示25x4个字节的空间,这取决一次需要多少字节的数据滤波。这里一次滤波需要25个int型的数据,因而每个缓存需要25x4字节。图中的蓝色填充表示缓存区中填满了数据,每次读完数据之后都需要切换缓存区,且IN_Buffer和OUT_Buffer的读写操作相反,即IN_Buffer的读操作是OUT_Buffer的写操作,程序框图如下图所示。 图上所示的三个程序均是并行处理的, , , 程序1代码如下(ADS1292R采用中断方式读取数据):
void EXTI9_5_IRQHandler(void)
{
if(EXTI->IMR&EXTI_Line5 && ADS_DRDY==0)//数据接收中断
{
ADS1292_Read_Data(ads1292_Cache);//数据存到9字节缓冲区
Update_ECG_Data(ads1292_Cache);
Cheack_lead_stata(ads1292_Cache);
if(state_pcb.SampleStartFlag==true)
WriteAdsInBuffer(ecg_info.ecg_data);//数据写入缓存区
}
EXTI_ClearITPendingBit(EXTI_Line5);
}
程序2代码如下(LVGL的心跳在定时器中周期调用,同时程序2也在其中运行,主要从滤波后的数据缓存中取出数据进行波形显示):
void Wave_show(void)
{
int value=0;
if(ReadEcgOutBuffer(&value)!=0) {
if(ecg_graph.send_type==GRAPH) {
ecg_graph.y_pose=Transf_EcgData_To_Vert(value,ecg_graph.sacle);
chart_add_data(ecg_graph.y_pose);
set_data_into_heart_buff(ecg_graph.y_pose);
} else if(ecg_graph.send_type==USART) {
//EcgSendByUart(value);
printf("%d\r\n",(int)alg(value/200));
}
}
}
//定时器3中断服务程序
void TIM3_IRQHandler(void)
{
static u8 show_cnt=0;
if(TIM3->SR&TIM_IT_Update)//溢出中断
{
show_cnt++;
lv_tick_inc(1);//lvgl的1ms心跳
if(show_cnt==3){
show_cnt=0;
Wave_show();
}
}
TIM3->SR = (uint16_t)~TIM_IT_Update;
}
程序3代码如下(在滤波函数中调用,用于承上启下,即从IN缓存中取出数据,滤波之后写入OUT缓存中):
void arm_fir_f32_lp(void)
{
float32_t *inputf32, *outputf32;
if(ReadAdsInBuffer() && WriterEcgOutBuffer()){
//指针定位成功
/* 初始化输入输出缓存指针 */
inputf32 = (float32_t *)InFifoDev.rp;
outputf32 =(float32_t *)OutFifoDev.wp;
/* 实现FIR滤波 */
arm_fir_f32(&S, inputf32, outputf32, BLOCK_SIZE);
//my_memcpy(OutFifoDev.wp,InFifoDev.rp,BLOCK_SIZE*4);
InFifoDev.state[InFifoDev.read_front]=Empty;
InFifoDev.read_front=(InFifoDev.read_front+1)%PACK_NUM;//切换读缓存块
OutFifoDev.state[OutFifoDev.writer_rear]=Full;
OutFifoDev.writer_rear=(OutFifoDev.writer_rear+1)%PACK_NUM;//切换写缓存块
}
}
关于缓存切换代码如下:
static void WriteAdsInBuffer(int date)
{
static u8 cnt=0;
if(InFifoDev.state[InFifoDev.writer_rear]==Empty){
//缓存块可写
InFifoDev.wp=&AdsInBuffer[InFifoDev.writer_rear*(BLOCK_SIZE)];//将写指针定位写缓存块
InFifoDev.wp[cnt++]=date;
if(cnt==BLOCK_SIZE){
cnt=0;
InFifoDev.state[InFifoDev.writer_rear]=Full;
InFifoDev.writer_rear=(InFifoDev.writer_rear+1)%PACK_NUM;//切换写缓存块
}
}
}
//定位读指针
//成功则返回1,不成功则返回0
u8 ReadAdsInBuffer(void)
{
if(InFifoDev.state[InFifoDev.read_front]==Full){
//缓存块可读
InFifoDev.rp=&AdsInBuffer[InFifoDev.read_front*(BLOCK_SIZE)];//将读指针定位读缓存块
return 1;
}
return 0;
}
//定位读指针
u8 WriterEcgOutBuffer(void)
{
if(OutFifoDev.state[OutFifoDev.writer_rear]==Empty){
//缓存块可写
OutFifoDev.wp=&EcgOutBuffer[OutFifoDev.writer_rear*(BLOCK_SIZE)];//将读指针定位读缓存块
return 1;
}
return 0;
}
//成功则返回1,不成功则返回0
u8 ReadEcgOutBuffer(int32_t *p)
{
static u8 cnt=0;
if(OutFifoDev.state[OutFifoDev.read_front]==Full){
//缓存块可读
OutFifoDev.rp=&EcgOutBuffer[OutFifoDev.read_front*(BLOCK_SIZE)];//将写指针定位读缓存块
*p=OutFifoDev.rp[cnt++];
if(cnt==BLOCK_SIZE){
cnt=0;
OutFifoDev.state[OutFifoDev.read_front]=Empty;
OutFifoDev.read_front=(OutFifoDev.read_front+1)%PACK_NUM;//切换写读缓存块
}
return 1;
}
return 0;
}
6.3、心电信号滤波
- 工频噪声滤除
滤除工频噪声的数字滤波算法主要有。小波变换能将心电信号进行多层分解,可以使得心电信号与工频噪声分离,但是计算量大,所占用的中间变量也比较多,对于单片机来说,处理的速度也不够快,因而对于系统的实时性这一指标很难实现。自适应滤波能够自动跟踪工频噪声的改变,但是需要增加一个输入信号作为参考,因而增加了系统的复杂性。在前面也讨论过心电信号95%的能量都是集中在0~40Hz,而工频噪声则在50Hz左右,过渡带比较宽,因而可以选择截止频率为40Hz的低通滤波器。 该低通滤波器利用MATLAB的生成,只需要选择低通滤波器是结构,选择窗函数,滤波器的阶数定为,选择采样频率为,截止频率为,参数如下图所示: 然后利用FDATOOL生成的冲激响应的数组,选择ARM官方的DSP库,调用arm_fir_f32函数,既可以完成一次滤波。但是在这之前,需要调用arm_fir_init_f32进行初始化。 滤波器系数如下:
const float32_t fir32LP[NUM_TAPS] = {
-7.484454468902e-22,-3.269336712398e-06,-1.365915864079e-05,-5.014073980636e-06,
6.804735231975e-05,0.0001662336497003,7.965197426322e-05,-0.0003784662837741,
-0.0008928563387901,-0.0005280588787408, 0.001284875839485, 0.003225662215767,
0.0022425431358,-0.003157084585057,-0.009028737319977,-0.007219934929014,
0.006057868257093, 0.02144319498633, 0.01971312591228,-0.009448071870685,
-0.04806332586811, -0.05291973061693, 0.01224382260678, 0.1388254178822,
0.2663085232723, 0.3199984843521, 0.2663085232723, 0.1388254178822,
0.01224382260678, -0.05291973061693, -0.04806332586811,-0.009448071870685,
0.01971312591228, 0.02144319498633, 0.006057868257093,-0.007219934929014,
-0.009028737319977,-0.003157084585057, 0.0022425431358, 0.003225662215767,
0.001284875839485,-0.0005280588787408,-0.0008928563387901,-0.0003784662837741,
7.965197426322e-05,0.0001662336497003,6.804735231975e-05,-5.014073980636e-06,
-1.365915864079e-05,-3.269336712399e-06,-7.484454468902e-22
};
static float32_t firStateF32[BLOCK_SIZE + NUM_TAPS - 1];
arm_fir_instance_f32 S;
void arm_fir_Init(void)
{
arm_fir_init_f32(&S, NUM_TAPS, (float32_t *)&fir32LP[0], &firStateF32[0], BLOCK_SIZE);
}
- 基线漂移
基线漂移与工频噪声不同,它是由于呼吸和电极滑动变化所异致的,其频率一般低于1Hz左右。常见对于基线漂移滤除的数字算法有等,其中高通滤波器可能会对心电信号的ST波段产生影响,毕竟基线漂移的频率也在ST波段里面。曲线拟合对较大的基线漂移处理能力较弱,处理的效果与处理数据的长度成正相关,因而不适用实时处理的系统。小波变换计算量大,也不适用实时处理的系统。相比之下,形态学滤波对心电信号的基线漂移滤除效果更好,计算量也比中值滤波小。但是形态学滤波要求数据长度足够长,因而会改变前面的缓存结构,并且在本系统中并未太严重的基线漂移,系统的任务也比较多,多方面权衡之下,选择不处理基线漂移。
- 肌电噪声的抑制
肌电噪声主要是由于人体肌肉颤抖导致体表的电位发生变化,这种噪声通过电极贴传导至心电模拟前端,并且这种噪声持续时间较短,使得ECG信号波形产生细小的波纹,这种噪声频率分布比较广,前面已经将心电信号通过截止频率为40Hz的低通滤波器,因而需要5点平滑滤波将细小的波纹滤除,为了不影响心电信号的实时处理,因而改进版的平滑滤波器代码如下:
/* * 滑动平均值滤波。 * 每调用一次,就加入一个新数据,并得到当前的滤波值。 */
float alg(float new_val)
{
/* 用一个减法,就做了"丢弃最旧的数据,加入最新的数据"这一操作 */
sum += (new_val - buf[pos]);
buf[pos] = new_val;
pos = (pos + 1) % MAX_COUNT;
/* 个数不足时,cnt是实际个数,个数足够时,cnt最多也只是MAX_COUNT */
pcnt += (pcnt < MAX_COUNT);
return sum / MAX_COUNT;
}
6.4、心率和QRS宽度检测
心率和QRS宽度检测作为本系统的算法核心,有了心率值和QRS宽度值才能进一步判断常见的心律失常。心率基本上都是检测两个R波之间的时隙来计算的,常见检测R的算法主要有阈值法、模板法和语句描述法。 而本系统的心率和QRS宽度检测算法是在一起检测的,所采用的算法是幅度阈值检测和差分检测相结合,因为观察心电信号的R波,发现R波是具有窄的脉冲,且脉冲的幅度是心电信号最高的,因而采用幅度和一阶差分共同约束找到R波,同时在找R波的同时还可以估计出QRS的宽度,算法的框图如图 ,通过R波幅度大且从Q到R一直递增,并且R波到S波的一阶差分值很大,从而将R波定位出来,检测两个R波之前的时间,然后通过如下公式就可以计算出心率: H R = ( 60 ∗ S a m p l e R a t e ) / c o u n t HR=(60*SampleRate) /count HR=(60∗SampleRate)/count
而QRS宽度则是由 Q R S = Q R S c n t ∗ 2.2 ∗ 1000 / ( S a m p l e R a t e ) QRS=QRScnt*2.2* 1000/(SampleRate) QRS=QRScnt∗2.2∗1000/(SampleRate)
上式中的2.2是估计值,因为QRS_cnt是在检测到R波之后才开始计数,并且未到S波谷停止计数,观察QRS波,发现Q到R与R到S近似对称,因而采用2.2这个估计值,这也是实时检测的缺陷,检测的样本不多。 心率算法和QRS宽度检测代码如下:
/** * @Brief 测量心率 * @Call * @Param * @Note * @Retval */ void ecg_heart_rate(int data) { int Signal=data; if(Signal>hr.vmax) hr.vmax=Signal; if(Signal<hr.vmin) hr.vmin=Signal; thresh=hr.vmax-(hr.vmax-hr.vmin)/5; for( uint16_t i = 0; i <= DATA_NUM_CAL_HR - 2; i++ ) { DataArrayCalHR[i] = DataArrayCalHR[i + 1]; } DataArrayCalHR[DATA_NUM_CAL_HR - 1] = Signal; Diff_Arrray( DiffDataArrayCalHR, DataArrayCalHR, DATA_NUM_CAL_HR ); //差分 if(hr.flag==StartDetected){ uint8_t FlagAllDiffRise = true; for( uint16_t i = 0; i <= DATA_NUM_CAL_HR - 2; i++ ) //判断波形是否一直上升 { if( DiffDataArrayCalHR[i] <= 0 ) { FlagAllDiffRise = false; break; } } if(FlagAllDiffRise==true){ hr.flag=QWave; } } else if(hr.flag==QWave)//已经找Q波 { if(DataArrayCalHR[DATA_NUM_CAL_HR-1]>thresh){ if(hr.count>125){ if( hr.firstBeat==true )//如果已经找到 过R波 { hr.rate=(float)60*SAMPLE_RATE/(hr.count); hr.count=0;//清除计数 hr.flag=RWave; QRScntflag=true; } else if(hr.firstBeat==false) { hr.firstBeat=true; hr.count=0;//清除计数 hr.flag=RWave; QRScntflag=true; } } } } else if(hr.flag==RWave ){ if(DiffDataArrayCalHR[0]<-(hr.vmax-hr.vmin)/5){ hr.flag=SWave; } } else 标签:hr系列传感器双极系列电源连接器te511温度lcd显示传感器8x4电阻器定时器ag960z电阻器ads7825p集成电路