对于高级自动驾驶来说,虚拟仿真测试是研发和测试验证过程中不可缺少的关键环节。此外,虚拟仿真测试的比例也在增加。虚拟仿真测试技术的发展和进步将直接影响高级自动驾驶技术商业化的时间。
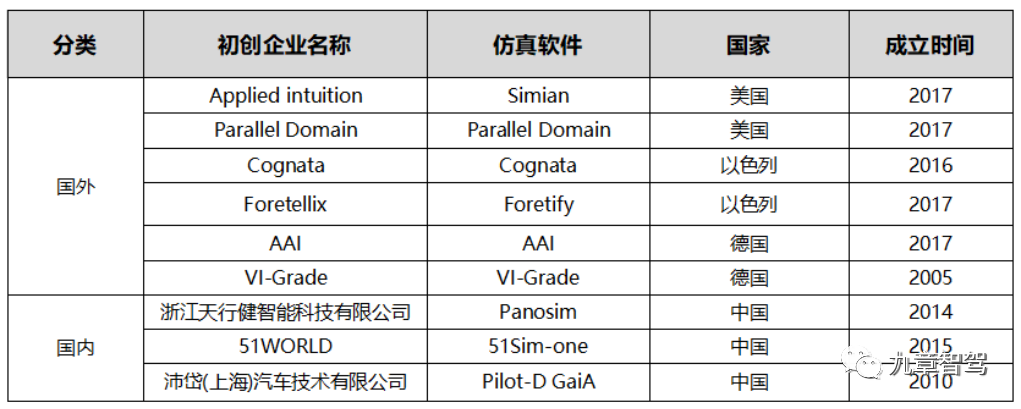
未来两三年,自动驾驶将进入下半年,商业应用带来的测试需求将催生模拟行业的新一轮重组;在这样的风口中,一些明星模拟企业将在未来诞生。接下来,作者对一些国内外自动驾驶模拟初创公司进行了简单的信息梳理。
1)初创团队 2)产品服务 3)融资过程/发展过程 4)合作伙伴
1.
:
在软件开发、机器人技术和自动驾驶汽车模拟领域;
谷歌、Waymo、微软,苹果,Uber、特斯拉、英伟达等国际公司的工作经验。
2.
:ADAS、应用于高级自动驾驶、货运和卡车运输、矿业、物流和室内AMR、农业、航空、送货机器人。
E-NCAPAEB场景测试;V模型开发过程中测试的各个阶段;自动化测试和CI 大规模并行模拟运行。
验证场景覆盖率;SOTIF 和 ISO 26262评估系统部署的安全准备;使用合成模拟数据来减少对道路测试和手动数据标记的需求。
1):基于导入地图和行为对象,创建现实世界的场景;有一个场景编辑器,可以在车辆上测试成千上万的场景,允许合作伙伴在错误时调试自己的自动驾驶汽车软件;跟踪每种情况的进展Simian 进度显示在仪表板上。
2):a.帮助合作伙伴通过查看测试场景收集的数据来评估自动驾驶汽车的相关指标。b.可以通过URL访问收集到的数据,并利用这些信息规划未来的自动驾驶系统。
3.
Woven Planet (丰田)、May Mobility、Kodiak、Scania等。
1.
:
1)自动驾驶系统、计算机视觉、机器学习和模拟;
微软,麦肯锡,PIXAR、EA、丰田、苹果等;
汽车制造和无人机快递
1)为用户驾驶训练和测试用例提供丰富的合成数据,使用户能够测试新的传感器和技术配置。
2)白天、夜晚、城市、雾天、雨天等测试场景可通过一系列传感器模拟合成,交通灯、车辆、行人、动物等混合元素可嵌入。
3)让合作伙伴回放现实世界的真实数据,并使用传感器模拟数据进行可视化。b.传递机器学习模型状态信息,渲染模拟场景,生成现实场景的变体,优化感知算法。
Woven planet(丰田)、Voyage 等。
1.
:三星,三星,honeywell、Mobileye等。
2.
专注于汽车领域ADAS和自动驾驶车辆模拟测试
:从简单的操作到复杂的多智能城市交互系统可参数场景的创建过程
平台自带定制的即装即用场景库
:扩展云架构和Studio UI/REST API 编辑界面,帮助测试架构师实施大规模测试方
Cognata 单机版:自动驾驶系统算法的快速迭代和调整,实现功能性验证
Cognata 云版:基于云的软件平台,可在并行计算实例上运行海量场景和仿真测试里程加速;加快了开发,测试和验证的速度
Cognata bench版:该版本是本地部署的软件模块,支持对所有系统进行硬件在环测试
3.
4.
微软、达索、英伟达、采埃孚、Innoviz、Forsight、Atlatec、Ouster等。
2.
ADAS和高速道路、ALKS、矿山作业
Foretify 仿真平台,基于M-SDL描述的场景自动生成海量有意义的测试,从而覆盖在智驾系统测试中可能遇到的所有相关情况、边缘条件及未知空间;在复杂性管理方面实现了两大突破:
“一个”场景规范反映“多个”场景特征
在多个平台进行的“多个”测试结果聚合成为“一个”覆盖率指标
可度量的场景描述语言(M-SDL),用于高级别描述场景和覆盖率目标
自动生成场景变量组合,与监视器共同检查和追踪场景覆盖率
跨所有测试平台(测试车辆、测试跟踪、仿真、X在环)聚合执行覆盖率数据的能力
携带预定义且可定制的验证计划,满足具体情况和ODD而设计的即拿即用抽象场景。
—— :用于ADAS和高速公路自动驾驶功能的、开箱即用的验证自动化的解决方案;验证包根据OEM、监管机构和合规机构的意见而开发。
—— :全球首个UNECE法规157的商业实施;该验证包提供了基于新法规的完整验证解决方案,包含三个交通干扰关键场景:切入、切出和减速。
—— :为矿山作业自驾系统而设计的特定ODD测试验证模组包。
4.
电装、沃尔沃、Humanetics、恒润科技、VIRES等。
1.
2.
聚焦于汽车领域的ADAS和自动驾驶车辆仿真测试
基于高精地图构建高仿真虚拟环境,利用从现实世界中采集到的驾驶行为数据,使用机器学习算法对交通参与者进行训练,从而逼真的模拟所有道路使用者和环境因素。
a. 定制化服务-基于高度模块化的产品架构,可以根据合作伙伴的意愿高效地创建个性化的解决方案。
—— 本地化地交通环境仿真
—— 从测试驱动数据自动创建测试用例
—— 基于传感器记录的映射即服务
—— 创建环境的数字孪生
—— 用于模拟的传感器仿真
b. 人工智能开发服务
c. 验证与确认服务
- 高质量训练和验证数据是开发的关键因素
聚类和图像分割
基于区域的图像分割
掩码生成分割
边缘图像分割
2D 和 3D 边界框
语义图像分割
基于层的图像分割
3)
处理传感器数据以创建 OpenDRIVE 格式的 OpenSCENARIO 文件和地图
重要性自动评估以识别高质量场景,导出基于场景的测试用例
将收集的场景细分为可区分的类别
在仿真中复制完整的测试场景以进行定性分析
分析原始测试场景覆盖率
3.
:奥迪、大陆、四维图新、3D MAPPING Solutions等。
1.
2.
汽车、摩托车、航天、铁路
1)VI-CarRealTime 汽车动力学实时仿真工具
为车辆动力学及控制系统工程师提供一个可以共同使用的整车动力学模型,进而使他们能够同时对汽车性能及车辆动态控制器(ABS、ESP、EPS、TCS等)的性能进行优化及实时测试。
2)VI-WorldSim -用于加速车辆开发的高分辨率图形环境
一个全新的图形环境,完全集成到 VI-DriveSim 中以支持驾驶模拟器
它不仅将基于Unreal图形引擎的传统赛道建模提升到更高水平的真实感 ,而且还添加了在 CAV 站点、城市环境和公共道路上进行ADAS和自动驾驶汽车测试所需的功能
创建车辆开发所需的测试场景,包括交通、行人、照明、天气和传感器等元素的模拟
预配置 EuroNCAP 场景:EuroNCAP 2021 测试已预先配置到其中
支持的常用的传感器类型和地面实况
3)VI-GraphSim - 用于实时车辆仿真的低延迟图形环境和模型可视化工具
是VI-grade驾驶模拟技术的重要组成部分,为静态和动态驾驶模拟器提供高分辨率和低延迟的图形环境
为驾驶员提供沉浸式环境,带来独特的驾驶模拟器体验:通过使用不同的摄像头,可以同时满足驾驶员和工程师的需求
来自涵盖许多不同赛车系列和汽车原始设备制造商的各种车型
为用户提供了一种新的方式来可视化车辆、轨道、周围环境和任何类型的道路场景
4)VI-DriveSim- 完整地控制驾驶模拟器的所有组件
切换到不同的车型以比较驾驶体验
将给定的轨道与有交通的公共道路场景交换以执行ADAS模拟仿真
将 HiL控制器与车辆测试连接
修改动态驾驶模拟器的运动提示参数
5)静态模拟器 - 逼真驾驶体验的解决方案
OEM、Tier1和研究机构可使用此模拟器来弥补物理测试和模拟仿真之间的差距
适用于软件在环和硬件在环应用
6)DiM动态模拟器 - 开放式驾驶模拟器
动态配置为驾驶员提供运动反馈,九自由度的移动平台
可以在同一个运动平台上对车辆动力学和驾驶进行并行研究
3.
:MRacing 、ShowCorporation 、沃尔沃、本田、蔚来、中汽研等。
1.
智能辅助驾驶系统、主动安全系统、行驶环境感知系统、下一代智能交通系统
PanoSim是一款集高精度车辆动力学模型、汽车行驶环境模型、车载环境传感模型与交通模型等于一体,并与Matlab/Simulink无缝链接以支持离线与实时仿真功能的智能驾驶一体化模拟仿真平台。
支持实时在线仿真:MIL/SIL/HIL/VIL
支持ADAS技术与产品的开发与测试
支持驾驶模拟体验与人机共驾系统的研发与测试
支持感知、规划、决策、控制算法研发与测试
高置信度车辆动力学模型:对标CarSim,支持27自由度复杂动力学模型
通用汽车、戴姆勒汽车、上汽集团、东风汽车、地平线、商泰汽车、上海保隆、腾讯等。
1.
2.
:智慧城市、智慧园区、智能汽车、智慧交通、智慧地产、智慧水务、智慧港口、智慧能源、智慧轨道以及智慧工厂等多个行业领域。
51Sim-One的功能模块覆盖自动驾驶全流程,集静态和动态数据导入、测试场景案例编辑、传感器仿真、动力学仿真、可视化、测试与回放、虚拟数据集生成于一体化的仿真测试平台。
实现多传感器仿真、交通流与智能体仿真、感知与决策仿真、自动驾驶行为训练等功能
可扩展的并行分布式仿真架构,可部署在单机、私有云和公有云环境
支持实时在线仿真:HIL/DIL
自动驾驶数字孪生评价测试
平台内置场景库和测试案例库
软件平台提供Python、C++、ROS、OSI等API接口
支持多车协同互动:平台支持接入多个测试系统,包括自动和手动驾驶系统
3.
4.
晶众地图、沃飞长空、上海机检、上汽、广汽等。
1.
2.
聚焦于汽车领域的ADAS和自动驾驶车辆仿真测试
自动驾驶仿真测试验证环境-GAIA :Standard版-单机解决方案,NET版-云计算和互动测试解决方案,RT版-提供HIL和VIL仿真测试
高保真(HIFI)环境感知传感器仿真与测试 :被动环境感知传感器(摄像头/远红外传感器)的物理级仿真和主动环境感知传感器(毫米波雷达/激光雷达)的物理级仿真
高保真(HIFI)车辆动力学仿真 :开发有基于双轨模型的测试车辆的动力学模型,有助于传统汽车研发初期的参数调试和并行开发
基于VR\AR\MR的驾驶模拟 :PilotD将视觉还原领域的虚拟现实(AR\VR\MR)技术运用到了驾驶模拟器的构建中
传感器融合和环境理解
新型自动驾驶系统设计和开发
VIL自动驾驶车辆在环平台\HIL硬件在环仿真测试
真实场景重现
基于事故分析的测试场景生成和重现
自动驾驶系统测试用例构建
视频及图像识别
4.
东南大学、同济大学、安亭上海国际汽车城、上海联合道路交通安全科学研究中心、昆易电子科技等。
“软件定义汽车”是当前智能网联汽车重要的发展趋势;工业软件正在从最开始作为辅助工具,逐步提升为推动汽车向数字化、网联化、自动化转型的新型平台;自动驾驶仿真软件作为工业软件的细分应用领域,是汽车实现自动化的关键。
目前开展自动驾驶仿真业务的企业类型有:、、传统仿真巨头企业和科技巨头公司在仿真软件开发、分布式计算、场景搭建等方面具有技术优势,并且行业发展越成熟,这种技术壁垒就愈发明显。
与此同时,传统仿真巨头和科技公司为了弥补自身在自动驾驶仿真领域的短板,也在不断的收购或兼并相关的初创企业,以扩展自己的业务领域,进而构建自身闭环的仿真平台。
主机厂为了保障未来其自动驾驶能力能够更高效的向前迭代,也开始在自动驾驶仿真领域进行布局,比如理想汽车已开始搭建自己的自动驾驶仿真平台;这在一定程度上也压缩了初创公司的市场空间。
因此对于中小型的初创公司而言,如果要活下来的话,当前也许就需要避其锋芒,放弃“大平台”定位,而转向“小应用”了——即根据自身的技术优势在仿真领域选择一块适合自己的细分领域去深耕,做“大平台”下面的一个不可或缺的“组件”。