本系列博客包括自动驾驶技术概述、自动驾驶汽车平台技术基础、自动驾驶汽车定位技术、自动驾驶汽车环境感知、自动驾驶汽车决策与控制、自动驾驶系统设计与应用六个栏目。作者不是自动驾驶领域的专家,只是一个探索自动驾驶道路的小白人。这个系列还没有读完,也是一边读一边总结一边思考。欢迎各位朋友,各位大牛在评论区给出建议,帮笔者这个小白挑错,谢谢! 本专栏是关于自动驾驶汽车环境感知的笔记
1.多传感器信息融合基础理论
1.1 概论
- 要实现自动驾驶,需要多个传感器相互配合,共同构成自动驾驶汽车的感知系统;
- 在多传感器信息集成过程中,需要解决以下关键问题:
- 由于每个传感器观察到的数据都在自己的参考框架内,因此在整合这些信息之前,必须将其交换到同一时空框架;必须补偿时空准备引起的舍入误差;
- 由于传感器工作环境的不确定性,观测数据中存在噪声成分,这些信息的不确定性需要在整合过程中最大限度地降低;
- 数据关联问题广泛存在,需要解决单传感器时间域和多传感空间域的关联问题,以确定来自同一目标源的数据;
- 在多传感器信息集成系统中,传感器接收到的测量数据有时有多种解释,称为数据不完整性;多传感器数据往往解释观测环境不一致甚至矛盾;
- 对车载系统的要求:
- 统一同步时钟,确保传感器信息的时间一致性和正确性;
- 多传感器校准准确,同时保证不同传感器信息的空间一致性;
1.2 多传感器信息融合基础理论
1.2.1 多传感器信息集成概述
- 传感器数据集成是针对系统使用各种传感器的信息处理方法,可以发挥各种传感器的联合优势,消除单个传感器的局限性;
- 把分布在不同位置的多个同类或不同类传感器所提供的数据资源加以综合,采用使计算机技术对其进行分析,加以互补,实现最佳协同效果,获得对被观测对象的一致性解释与描述,提高系统的容错性,从而提高系统决策、规划、反应的快速性和正确性,使系统获得更充分的信息;
- 多传感器融合技术优势:
- 各种传感器相互补充,可以避免单个传感器的局限性,最大限度地发挥各传感器的优取被检测对象的各种特征信息,减少环境、噪声等干扰;
- 多传感器集成可以带来一定的信息冗余。即使传感器出现故障,系统也能在一定范围内继续正常工作,容错性高,增加了系统决策的可靠性和可信度;
- 采用多传感器集成技术收集的信息具有明显的互补性,覆盖了更广泛的空间和时间,弥补了单传感器对空间的分辨率和环境的语义不确定性。
- 在保证性能的基础上,可以实现多个低成本传感器而不是昂贵的传感器设备;
- 传感器融合过程:
- 多个传感器独立工作获取观察数据;
- 每个传感器数据(RGB预处理图像、点云数据等。
- 对处理数据进行特征提取、变换,并进行模式识别处理,获取对观察对象的描述信息;
- 在数据融合中心按照一定的标准进行数据关联;
- 各传感器数据采用足够优化的算法集成,对观测对象进行一致性描述和解释。
1.2.2 多传感器集成结构
将多传感器信息融合分为:Low-level融合、High-level融合与混合结构;
- Low-level集成:包括数据级融合和特征级融合,是集中融合结构;
- High-level一体化:一种决策级融合,可以是集中融合或分布式融合;
- 混合结构:多种Low-level和High-level由结构组合而成;
1.2.2.1 Low-level融合
Low-level集成系统结构是信息水平较低的融合,是集中融合结构; 集中式集成结构集成精度高,算法灵活,但处理器要求高,计算量大,成本高,数据流量单一,底层传感器之间缺乏信息通信,可靠性低,难以实现; 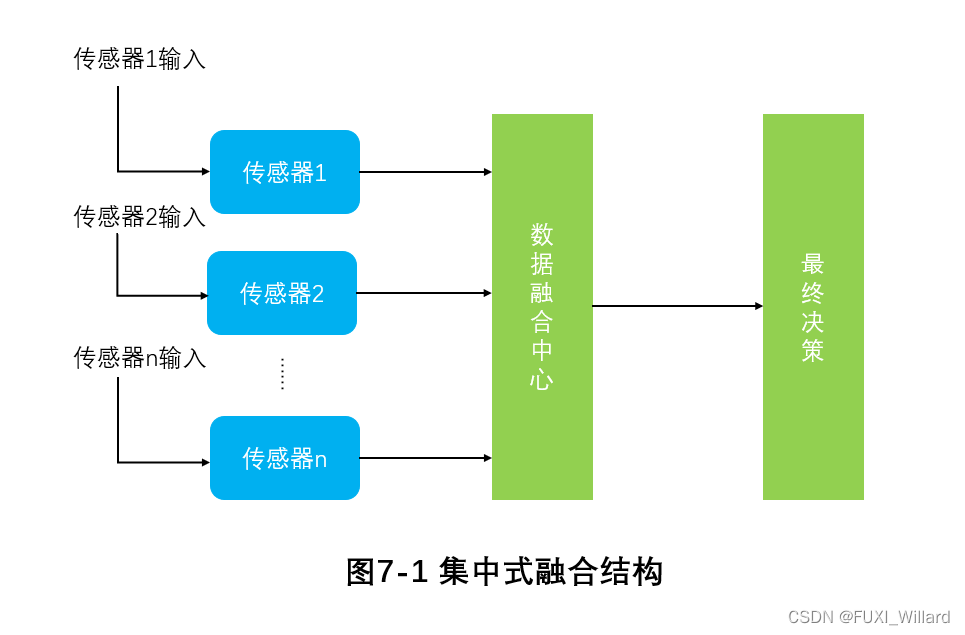
- 数据级融合
- 根据集成内容,数据级集成分为。
- 特征级融合
- 特征级融合分为目标状态信息融合和目标特征融合;
1.2.2.2 High-level融合
分布式集成结构计算速度快,连续性好,传感器故障时可继续工作,可靠性高;分布式集成结构对通信带宽要求低,适用于远程传感器信息反馈,但在低通信带宽中传输会造成一定的损失,降低精度。
1.2.2.3 混合结构
1.2.2.4 比较三种融合结构
| 体系结构 | 分布式 | 集中式 | 混合式 |
|---|---|---|---|
| 信息损失 | 大 | 小 | 中 |
| 精度 | 低 | 高 | 中 |
| 小 | 大 | 中 | |
| 可靠性 | 高 | 低 | 高 |
| 计算速度 | 快 | 慢 | 中 |
| 可扩充性 | 好 | 差 | 一般 |
| 融合处理 | 容易 | 复杂 | 中等 |
| 融合控制 | 复杂 | 容易 | 中等 |
1.2.3 多传感器融合算法
多传感器融合常用算法:随机类和人工智能方法。;
1.2.3.1 随机类方法
-
加权平均法 加权平均法简单、直观,根据多个传感器独立探测的数据,乘上相应的权值,累加求和并取平均值,将其结果作为融合值。
-
贝叶斯估计法 贝叶斯估计法由Thomas Bayes提出,基于先验概率,并不断结合新的数据信息来得到新的概率;贝叶斯估计法常用于静态环境下特征层的融合,主要公式为: P ( A i ∣ B ) = P ( B ∣ A i ) P ( A i ) ∑ i = 1 n P ( B ∣ A i ) P ( A i ) P(A_i|B)=\frac{P(B|A_i)P(A_i)}{\sum_{i=1}^nP(B|A_i)P(A_i)} P(Ai∣B)=∑i=1nP(B∣Ai)P(Ai)P(B∣Ai)P(Ai) 贝叶斯估计法局限性在于其工作基于先验概率,若没有先验概率,则需要通过大量的数据统计来实现,往往需要耗费大量的时间和精力。
-
D-S证据理论 D-S证据理论是贝叶斯估计的扩展,是一种用于决策层的信息融合方法,三个基本要素:基本概率赋值函数、信任函数和似然函数。D-S证据理论不要求在未知情况下对每个事件进行单独赋值,仅将信任值赋给信任项,先将所有不确定时间都归为未知命题,然后通过证据组合来不断缩小未知的范围,直到达到判决条件。
-
卡尔曼滤波法 。 估 计 : 根 据 测 量 得 出 的 跟 目 前 的 状 态 x ( t ) 有 关 的 数 据 z ( t ) = h [ x ( t ) ] + v ( t ) 解 算 出 x ( t ) 的 计 算 值 x ^ ( t ) , 其 中 随 机 向 量 v ( t ) 称 为 量 测 误 差 , x ^ ( t ) 称 为 x ( t ) 的 估 计 , z ( t ) 称 为 x ( t ) 的 量 测 。 因 为 x ^ ( t ) 是 根 据 z ( t ) 确 定 的 , 所 以 x ^ ( t ) 是 z ( t ) 的 函 数 ; 如 果 x ^ ( t ) 是 z ( t ) 的 线 性 函 数 , 则 x ^ ( t ) 称 为 x ( t ) 的 线 性 估 计 。 估计:根据测量得出的跟目前的状态x(t)有关的数据z(t)=h[x(t)]+v(t)解算出x(t)的计算值\hat{x}(t),\\其中随机向量v(t)称为量测误差,\hat{x}(t)称为x(t)的估计,z(t)称为x(t)的量测。\\因为\hat{x}(t)是根据z(t)确定的,所以\hat{x}(t)是z(t)的函数;如果\hat{x}(t)是z(t)的线性函数,则\hat{x}(t)称为x(t)的线性估计。 估计:根据测量得出的跟目前的状态x(t)有关的数据z(t)=h[x(t)]+v(t)解算出x(t)的计算值x^(t),其中随机向量v(t)称为量测误差,x^(t)称为x(t)的估计,z(t)称为x(t)的量测。因为x^(t)是根据z(t)确定的,所以x^(t)是z(t)的函数;如果x^(t)是z(t)的线性函数,则x^(t)称为x(t)的线性估计。 设 在 [ t 0 , t 1 ] 时 间 段 内 的 量 测 为 z ( t ) , 与 之 对 应 的 估 计 为 x ^ ( t ) , 则 有 三 种 对 应 关 系 : 设在[t_0,t_1]时间段内的量测为z(t),与之对应的估计为\hat{x}(t),则有三种对应关系: 设在[t0,t1]时间段内的量测为z(t),与之对应的估计为x^(t),则有三种对应关系:
- 若 t = t 1 , 则 x ^ ( t ) 称 为 x ( t ) 的 估 计 若t=t_1,则\hat{x}(t)称为x(t)的估计 若t=t1,则x^(t)称为x(t)的估计;
- 若 t > t 1 , 则 x ^ ( t ) 称 为 x ( t ) 的 预 测 若t>t_1,则\hat{x}(t)称为x(t)的预测 若t>t1,则x^(t)称为x(t)的预测;
- 若 t < t 1 , 则 x ^ ( t ) 称 为 x ( t ) 的 平 滑 若t<t_1,则\hat{x}(t)称为x(t)的平滑 若t<t1,则x^(t)称为x(t)的平滑。
最 优 估 计 : 指 某 一 指 标 函 数 达 到 最 值 时 的 估 计 ; 若 以 量 测 估 计 z ( t ) 的 偏 差 的 平 方 和 达 到 最 小 为 指 标 , 即 最优估计:指某一指标函数达到最值时的估计;若以量测估计z(t)的偏差的平方和达到最小为指标,即 最优估计:指某一指标函数达到最值时的估计;若以量测估计z(t)的偏差的平方和达到最小为指标,即: min ( z − z ^ ) T ( z − z ^ ) \min(z-\hat{z})^T(z-\hat{z}) min(z−z^)T(z−z^) 则 所 得 估 计 x ^ ( t ) 称 为 x ( t ) 的 最 小 二 乘 估 计 则所得估计\hat{x}(t)称为x(t)的最小二乘估计 则所得估计x^(t)称为x(t)的最小二乘估计 min E ( ( x − x ^ ) T ( x − x ^ ) ) \min{E((x-\hat{x})^T(x-\hat{x}))} minE((x−x^)T(x−x^)) 若 x ^ ( t ) 又 为 x ( t ) 的 线 性 估 计 , 则 x ^ ( t ) 称 为 x ( t ) 的 线 性 最 小 方 差 估 计 。 若\hat{x}(t)又为x(t)的线性估计,则\hat{x}(t)称为x(t)的线性最小方差估计。 若x^(t)又为x(t)的线性估计,则x^(t)称为x(t)的线性最小方差估计。 最 小 二 乘 估 计 : 适 用 于 对 随 机 向 量 或 常 值 向 量 的 估 计 , 其 达 到 的 最 优 指 标 是 使 量 测 估 计 的 精 度 达 到 最 佳 ; 最 小 方 差 估 计 : 使 均 方 差 最 小 的 估 计 , 是 估 计 方 法 中 精 度 最 高 的 。 最小二乘估计:适用于对随机向量或常值向量的估计,其达到的最优指标是使量测估计的精度达到最佳;\\最小方差估计:使均方差最小的估计,是估计方法中精度最高的。 最小二乘估计:适用于对随机向量或常值向量的估计,其达到的最优指标是使量测估计的精度达到最佳;最小方差估计:使均方差最小的估计,是估计方法中精度最高的。