目录
- 摘要
- 1 介绍
-
- 1.1 相关工作
-
- A 基于特征的方法
- B 直接方法
- C 位姿图优化
- 1.2 贡献和大纲
- 2 初步准备(preliminaries)
-
- 2.1 3D刚体变换和类似变换
- 2.2 李代数流形加权高斯牛顿优化方法
- 2.3 传播不确定性
- 3 大尺度直接单目SLAM
-
- 3.1 完整的算法
- 3.2 地图表示
- 3.3 跟踪新帧:直接 s e ( 3 ) \mathfrak{se}(3) se(3)图像对齐
- 3.4 深度图估计
- 3.5 约束获取:直接 s i m ( 3 ) \mathfrak{sim}(3) sim(3)图像对齐
- 3.6 地图优化
- 4 结果
-
- 4.1 大轨迹的定性结果
- 4.2 定量评估
- 4.3 s i m ( 3 ) \mathfrak{sim}(3) sim(3)跟踪的收敛半径
- 5 结论
- 参考文献
摘要
我们提出了直接(无特征)单目SLAM与目前最先进的直接方法相比,该算法允许构建大规模、一致的环境地图。采用基于直接图像对齐的高精度位置估计方法,实时重建三维环境。这是通过小基线双目相机滤波获得的。对尺度漂移的分析表明,该方法可用于具有挑战性的序列,包括中尺度变化较大的序列。本文有两个创新点:(1) s i m ( 3 ) \mathfrak{sim(3)} sim(3)一种新的直接跟踪方法,以清楚地检测尺度漂移;(2)一个优雅的概率解决方案,包声的深度值纳入跟踪。由此产生的直接单目SLAM系统在CPU实时操作。
1 介绍
实时单目同时定位和建图(SLAM)三维重建已成为一个越来越受欢迎的研究课题。两个主要原因是:(1)它们在机器人领域的应用,特别是无人机(UAV)导航)增强现实和虚拟现实的应用正在慢慢进入大众市场。
单目SLAM最大的挑战之一是其固有的模糊尺度。现实世界的规模是无法观察到的,会随着时间的推移而漂移,这是误差的主要来源之一。它的优点是可以在室内办公桌环境和大型室外环境等不同规模的环境之间无缝切换。另一方面,具有尺度的传感器,如深度相机或双目相机,可以提供有限的可靠测量范围,因此不能提供这种灵活性。
1.1 相关工作
A 基于特征的方法
基于特征的方法(包括滤波器和关键帧)的基本思想是将整个问题分解为两个连续步骤,即从图像中估计几何信息。首先,从图像中提取一组特征观察。其次,计算相机的位置和场景的几何作为这些特征观测的函数。
这种解耦虽然简化了整个问题,但也有重要的限制。只能使用符合特征类型的信息。特别是在使用关键点时,包含直线边缘或曲线边缘的信息,特别是在人工环境中构成图像的很大一部分,将被丢弃。在过去,有几种方法可以通过基于边缘甚至区域的特征来弥补这一缺陷。但由于高维特征空间的估计繁琐,在实际应用中很少使用。为了获得密集的重建,采用多视图几何连续重建了估计的相机位置。
B 直接方法
直接视觉里程计(VO)该方法绕过这一限制,直接优化图像的灰度以获得几何图像,该方法可以使用图像中的所有信息。可以提供更多关于环境几何的信息,除了更高的准确性和鲁棒性,特别是在关键点较少的环境中,这对机器人或增强实际应用非常有价值。
虽然RGB-D直接图像对齐算法已经很好地确定了相机或双目传感器,但直到最近才提出单目直接VO算法。在文献[20、21、24]中,精确、完全致密的深度图采用变分公式计算,但该方法计算量大,需要最先进GPU实时运行。在文献[9]中,提出了一密度深度滤波公式,大大降低了计算的复杂性CPU即使在现代智能手机上实时运行。文献[10]通过将直接跟踪与关键点相结合,实现了嵌入式平台上高帧率的实时运行。然而,所有这些方法都是纯视觉里程计,它们只在局部跟踪相机的运动,不能建立一致的、全球的、带回环的环境地图。
C 位姿图优化
这是一种名字SLAM该技术用于构建一致的全球地图。世界被称为由位置约束连接的几个关键帧,可以使用通用的图形优化框架(如g2o)进行优化。
在文献[14]中,基于位置图提出了一种RGB-D SLAM该方法引入几何误差,允许在纹理较少的场景中跟踪。解决单目问题SLAM文献[23]提出了基于关键点的单目标SLAM该系统将相机置表示为3D类似的变化,而不是刚体运动。
1.2 贡献和大纲
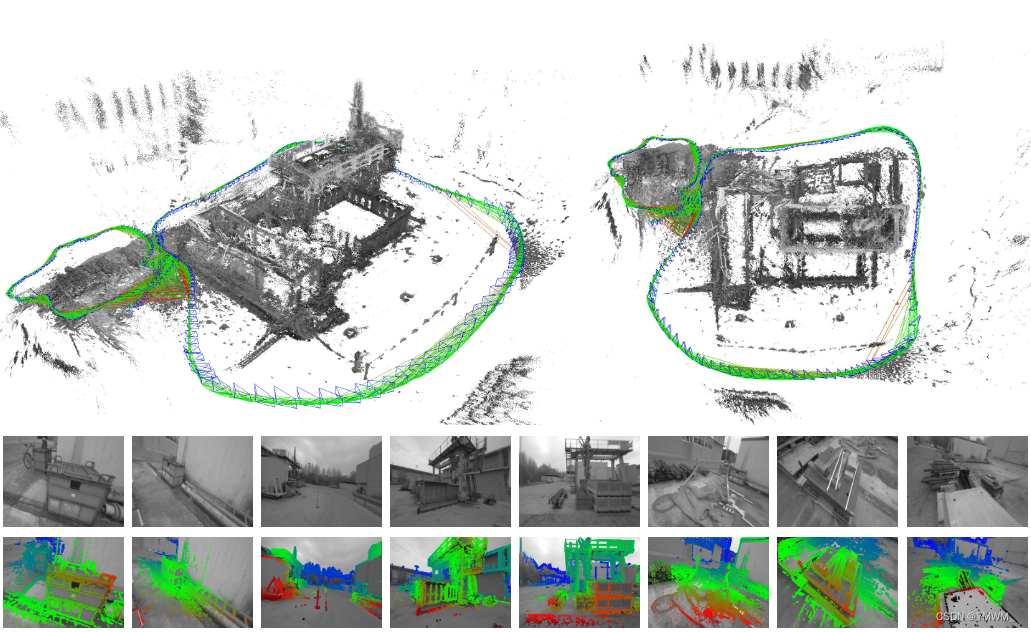
我们提出了大规模直接单目SLAM(LSD-SLAM)该方法不仅可以局部跟踪相机的运动,还可以建立一致的大规模环境地图(见图1和图2)。该方法采用直接图像对齐,并结合文献[9]中首次提出的基于滤波的半密度深度图进行估计。整体地图以位置图的形式表示,关键帧为顶点,3D似变换作为边,优雅地融入环境的尺度比例,并允许检测和修正累积漂移。该方法在CPU上实时运行,甚至在现代智能手机上作为里程计运行。本文的主要贡献如下。(1)一种用于大规模直接的单目SLAM的框架,特别是一种新的尺度感知图像对齐算法,可以直接估计两个关键帧之间的相似性变换 ξ ∈ s i m ( 3 ) \xi \in \mathfrak{sim}(3) ξ∈sim(3)。(2)概率一致地将估计深度的不确定性纳入跟踪。
2 初步准备(preliminaries)
在本章中,我们对相关的数学概念和符号作了简要的总结。特别地,我们将位姿用李代数表示(第2.1节),推导出李流上直接图像对齐的加权最小二乘(第2.2节),并简要介绍不确定性的传播(第2.3节)。
。我们用粗体大写字母( R \pmb{R} RRR)表示矩阵,用粗体小写字母表示向量( ξ \pmb{\xi} ξξξ)。矩阵的第 n n n行记作 [ ⋅ ] n [\cdot]_n [⋅]n。图像记作 I : Ω → R I:\ \Omega \rightarrow \mathbb{R} I: Ω→R,其中 Ω ⊂ R 2 \Omega \subset \mathbb{R}^2 Ω⊂R2为归一化的像素坐标, R \mathbb{R} R表示一维实数。像素级逆深度图记作 D : Ω → R + D:\ \Omega \rightarrow \mathbb{R}^+ D: Ω→R+。像素级逆深度方差图记作 V : Ω → R + V: \ \Omega \rightarrow \mathbb{R}^+ V: Ω→R+。在整篇文章中,我们使用 d d d来表示路标点深度 z z z的倒数,即 d = z − 1 d=z^{-1} d=z−1。
2.1 3D刚体变换和相似变换
。三维刚体变换 G ∈ S E ( 3 ) \pmb{G} \in \mathrm{SE}(3) GGG∈SE(3)表示三维的旋转和平移,记作 G = ( R t 0 1 ) R ∈ S O ( 3 ) , t ∈ R 3 (1) \pmb{G}=\begin{pmatrix} \pmb{R} & \pmb{t} \\ \pmb{0} & 1 \end{pmatrix} \ \ \pmb{R} \in \mathrm{SO}(3), \ \pmb{t}\in \mathbb{R}^3 \tag{1} GGG=(RRR000ttt1) RRR∈SO(3), ttt∈R3(1) 在优化过程中,需要一个相机位姿的最小表示,它由相关李代数的对应元素 ξ ∈ s e ( 3 ) \pmb{\xi} \in \mathfrak{se}(3) ξξξ∈se(3)给出。李代数通过指数映射转换为李群,即 G = e x p s e ( 3 ) ( ξ ) \pmb{G}=\mathrm{exp}_{se(3)}(\pmb{\xi}) GGG=expse(3)(ξξξ)。该映射的逆变换为 ξ = l o g S E ( 3 ) ( G ) \pmb{\xi}=\mathrm{log}_{SE(3)}(\pmb{G}) ξξξ=logSE(3)(GGG)。此外,我们使用 s e ( 3 ) \mathfrak{se}(3) se(3)中的元素来表示位姿,直接写作向量 ξ ∈ R 6 \pmb{\xi}\in \mathbb{R}^6 ξξξ∈R6。从坐标系 i i i移动一个点到坐标系 j j j的变换记作 ξ j i \pmb{\xi}_{ji} ξξξji。为方便起见,我们将位姿连接操作符 ∘ : s e ( 3 ) × s e ( 3 ) → s e ( 3 ) \circ: \mathfrak{se}(3) \times \mathfrak{se}(3) \rightarrow \mathfrak{se}(3) ∘:se(3)×se(3)→se(3)定义为, ξ k i : = ξ k j ∘ ξ j i : = l o g S E ( 3 ) ( e x p s e ( 3 ) ( ξ k j ) ⋅ e x p s e ( 3 ) ( ξ j i ) ) (2) \pmb{\xi}_{ki} :=\pmb{\xi}_{kj} \circ \pmb{\xi}_{ji} := \mathrm{log}_{SE(3)}\big( \mathrm{exp}_{se(3)}(\pmb{\xi}_{kj}) \cdot \mathrm{exp}_{se(3)}(\pmb{\xi}_{ji}) \big) \tag{2} ξξξki:=ξξξkj∘ξ