1. Linux介绍下驱动框架
1.1 驱动框架分类
Linux下驱动框架分为3大类型:
-
字符设备 ---------
-
块设备 存储设备 SD 硬盘
-
网络设备 网卡 无线 有线
字符设备和块设备将生成设备节点/dev目录下。
网络设备不会生成设备节点. 可以使用ifconfig查看
-
RTC设备驱动
-
LCD屏幕设备驱动-帧缓冲设备框架
-
声卡设备驱动-音频设备
-
标准输入设备驱动-输入子系统框架
-
…等等
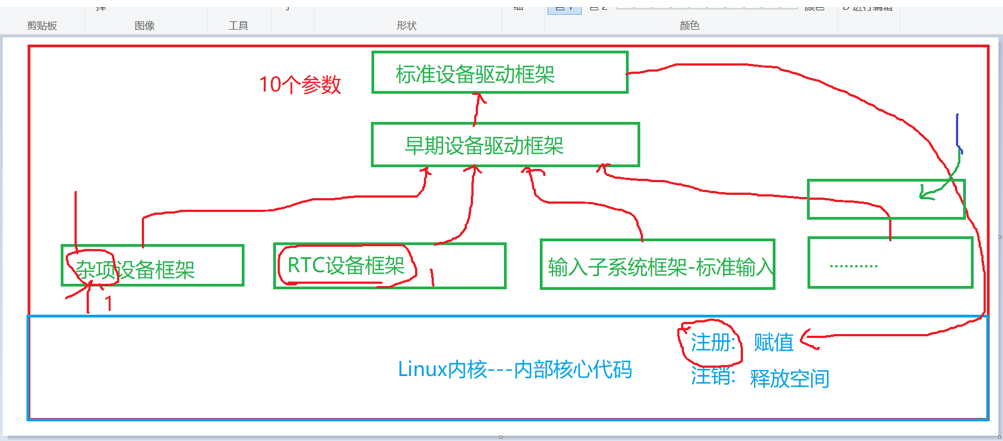
内核提供的字符设备注册方式: 原生-底层注册方式
-
早期设备注册方式—linux 2.6
-
标准设备注册方式
-
杂项设备注册方式
比如: 温度传感器、湿度传感器、光照度、门锁、LED灯、蜂鸣器 驱动是用字符设备框架编写的
1.2 驱动框架代码模板
#include <linux/kernel.h> #include <linux/module.h> static int __init tiny4412_hello_drv_init(void) {
printk("Hello 驱动注册-安装成功.\n"); return 0; } static void __exit tiny4412_hello_drv_exit(void) {
printk("Hello 成功注销成功.\n"); } /*驱动入口*/ module_init(tiny4412_hello_drv_init); /*驱动出口*/ module_exit(tiny4412_hello_drv_exit); /*许可证*/ MODULE_LICENSE("GPL"); 1.3 Makefile示例代码
KER_DRI=/home/wbyq/work/linux-3.5/linux-3.5 all: make -C $(KER_DRI) M=`pwd` modules clean: make -C $(KER_DRI) M=`pwd` modules clean obj-m = drv_hello.o 编译完成后,生成的驱动文件名称仍然是xxxx.ko文件。以ko为后缀。
1.4 安装驱动过程
[root@wbyq ]#insmod drv_hello.ko
[ 435.765000] Hello 驱动注册-安装成功.
[root@wbyq ]#rmmod drv_hello.ko
rmmod: can't change directory to '/lib/modules': No such file or directory [root@wbyq ]#mkdir /lib/modules [root@wbyq ]#rmmod drv_hello.ko rmmod: can't change directory to '3.5.0-FriendlyARM': No such file or directory
[root@wbyq ]#
[root@wbyq ]#
[root@wbyq ]#mkdir /lib/modules/3.5.0-FriendlyARM
[root@wbyq ]#rmmod drv_hello.ko
[ 1024.225000] Hello 驱动注销成功.
[root@wbyq ]#insmod drv_hello.ko
[ 1080.500000] Hello 驱动注册-安装成功.
[root@wbyq ]#lsmod
drv_hello 614 0 - Live 0xbf004000 (O)
[root@wbyq ]#modinfo drv_hello.ko
modinfo: can't open '/lib/modules/3.5.0-FriendlyARM/modules.dep': No such file or directory
[root@wbyq ]#touch /lib/modules/3.5.0-FriendlyARM/modules.dep
[root@wbyq ]#modinfo drv_hello.ko
filename: drv_hello.ko
license: GPL
depends:
vermagic: 3.5.0-FriendlyARM SMP preempt mod_unload ARMv7 p2v8
[root@wbyq ]#
-
动态安装. lsmod 查看动态方式安装的驱动.
-
静态安装. 静态是固化到内核里的。
2. 杂项设备框架
2.1 框架结构介绍
杂项字符设备的主设备号固定: 10 主设备号: 0 ~ 255
次设备号范围: 0 ~ 255
Linux内核寻找驱动节点是依靠设备号寻找的。
主设备号(区分类型)、次设备号(区分同类型的具体设备)
主设备号: 10 ,240
下面是查看串口设备节点、MMC设备节点的详细信息:
Linux下把无法分类的一些设备都归类为杂项设备,杂项设备本身就是字符设备,只是简单封装了一层,注册调用更加简单。杂项设备(misc device)是在嵌入式系统中用得比较多的一种设备驱动。
在Linux内核的include\linux目录下有Miscdevice.h文件,misc设备定义及其内核提供的相关函数在这里。
struct miscdevice {
int minor; //次设备号,杂项设备的主设备?10
const char *name; //设备的名称
const struct file_operations *fops; //文件操作
/* 下面的成员是供内核使用 ,驱动编写不需要理会 */
struct list_head list; //misc_list的链表头
struct device *parent; //父设备
struct device *this_device; //当前设备,是device_create的返回值
};
杂项设备结构里有一个文件集合指针,当字符设备驱动安装成功之后,在应用层是open函数打开这个设备文件,会访问到驱动层里文件集合对应的函数。
2.2 蜂鸣器驱动示例代码
这是蜂鸣器的驱动层示例代码,使用杂项设备框架编写:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/miscdevice.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <asm/io.h>
static volatile unsigned int *GPD0CON=NULL;
static volatile unsigned int *GPD0DAT=NULL;
static int tiny4412_open(struct inode *my_indoe, struct file *my_file)
{
printk("open ok\n");
/*设置蜂鸣器为输出模式*/
*GPD0CON &= ~(0xf << 0 * 4);
*GPD0CON |= (1 << 0 * 4);
return 0;
}
static int tiny4412_release(struct inode *my_indoe, struct file *my_file)
{
printk("open release\n");
*GPD0DAT &=~(1 << 0); //关蜂鸣器
return 0;
}
static ssize_t tiny4412_read(struct file *my_file, char __user *buff, size_t cnt, loff_t *loff)
{
*GPD0DAT |= (1 << 0); //开蜂鸣器
return 0;
}
static ssize_t tiny4412_write(struct file *my_file, const char __user *buff, size_t cnt, loff_t *loff)
{
*GPD0DAT &=~(1 << 0); //关蜂鸣器
return 0;
}
static struct file_operations tiny4412_fops=
{
.open=tiny4412_open,
.release=tiny4412_release,
.read=tiny4412_read,
.write=tiny4412_write,
};
static struct miscdevice misc={
.minor=255,
.name="tiny4412_hello", // /dev/下的名称
.fops=&tiny4412_fops,
};
//__init标号: 对应一段代码(汇编)--一般设置属性(指定文本段存放的位置)。 执行hello_init函数之前先执行__init
static int __init hello_init(void)
{
/*1. 注册杂项字符设备*/
misc_register(&misc);
/*映射地址*/
GPD0CON=ioremap(0x114000A0,4);
GPD0DAT=ioremap(0x114000A4,4);
printk("hello_init 驱动安装成功!\n");
return 0;
}
static void __exit hello_exit(void)
{
/*2. 注销*/
misc_deregister(&misc);
iounmap(GPD0CON); //将映射的地址释放掉
iounmap(GPD0DAT);
printk("hello_exit驱动卸载成功!\n");
}
module_init(hello_init); //驱动入口。安装驱动的时候调用
module_exit(hello_exit); //驱动出口。卸载驱动的时候调用
MODULE_AUTHOR("www.edu118.com"); //声明驱动的作者
MODULE_DESCRIPTION("hello 模块测试"); //描述当前驱动功能
MODULE_LICENSE("GPL"); //驱动许可证。支持的协议GPL。
#include <stdio.h>
int main(int argc,char**argv)
{
int fd;
fd=open("/dev/tiny4412_hello",2); //3 0 - 1 - 2
if(fd<0)
{
printf("驱动打开失败!\n");
return -1;
}
int data1;
int data2;
while(1)
{
read(fd,&data1,4);
sleep(1);
write(fd,&data2,4);
sleep(1);
}
close(fd);
return 0;
}