Transform Configuration(变换配置)
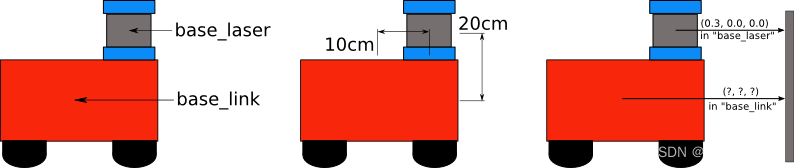 假设我们知道传感器挂在身体中心前方10cm,高度20cm地方。这等于给了我们一种转换的偏移关系。具体来说,从传感器到身体的坐标转换关系应该是(x:0.1m,y:0.0m, z:0.2m),相反的转换是(x:-0.1m,y:0.0m,z:0.2m)。 利用tf为了管理这种关系,我们需要将它们添加到转换树中(transform tree)一方面,转换树中的每个节点都对应着一种坐标系,节点之间的连接是两个坐标相互转换的表示,是从当前节点到子节点的转换表示。Tf利用树结构保证了两个坐标系之间的结构,假设节点之间的连接方向是 基于例子,需要创建两个节点,一个base_link一个是base_laser”。
假设我们知道传感器挂在身体中心前方10cm,高度20cm地方。这等于给了我们一种转换的偏移关系。具体来说,从传感器到身体的坐标转换关系应该是(x:0.1m,y:0.0m, z:0.2m),相反的转换是(x:-0.1m,y:0.0m,z:0.2m)。 利用tf为了管理这种关系,我们需要将它们添加到转换树中(transform tree)一方面,转换树中的每个节点都对应着一种坐标系,节点之间的连接是两个坐标相互转换的表示,是从当前节点到子节点的转换表示。Tf利用树结构保证了两个坐标系之间的结构,假设节点之间的连接方向是 基于例子,需要创建两个节点,一个base_link一个是base_laser”。
由于tf假设所有的转换都是从parent到child所以谁是parent有区别。我们选择“base_link作为坐标系parent,其加其他传感器作为装置robot的,对于“base_link”和“base_laser对他们来说,的。这意味着转换关系的表达应该是(x:0.1m,y0.0m,z:0.2m)。关系的建立正在收到base_laser从数据到base_link转换过程可以简单地调用tf可以完成库。
Broadcasting a Transform(广播变换)
实现广播任务base_laser->base_link。 tf_broadcaster.cpp: #include <ros/ros.h> #include <tf/transform_broadcaster.h> int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_publisher"); ros::NodeHandle n; ros::Rate r(100); tf::TransformBroadcaster broadcaster; while(n.ok()){
broadcaster.sendTransform( tf::StampedTransform( tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.1, 0.0, 0.2)), ros::Time::now(),"base_link", "base_laser")); # 通过TransformBroadcaster需要5个参数来发送转换关系。 # 在第一个参数中,我们传递了旋转变换,必须调用两个坐标系发送的任意旋转btQuaternion.现在我们不想旋转,所以我们在调用btQauternion的时候,将pitch,roll,yaw的参数都置0. # 第2个参数,btVector3.需要调用任何变换过程。我们调用它btVector3.相应传感器的x方向与机体基准偏差10cm,z方向20cm。 # 在第三个参数中,我们需要携带一个时间戳来确定转换关系。我们标记为ros::Time::now()。 # 我们需要传递第四个参数parent节点的名字。 # 第五个参数传递child节点名称。 r.sleep(); } } Using a Transform(调用变换)
上述节点发布l转换关系,baser_laser->base_link。 现在,我们需要利用转换关系将从传感器获得的数据转换为身体对应的数据,即base_laser”->到“base_link转换坐标系。 tf_listener.cpp:
#include <ros/ros.h> #include <geometry_msgs/PointStamped.h> #include <tf/transform_listener.h>
//一个TransformListener目标会自动的订阅ROS系统中的变换消息主题,同时管理所有的该通道上的变换数据。
void transformPoint(const tf::TransformListener& listener){
//we'll create a point in the base_laser frame that we'd like to transform to the base_link frame
geometry_msgs::PointStamped laser_point; //创建一个虚拟点,作为geometry_msgs::PointStamped。
laser_point.header.frame_id = "base_laser"; //对于header里的frame_id,设置为“base_laser”,因为创建的是雷达坐标系里的点。
//we'll just use the most recent transform available for our simple example
laser_point.header.stamp = ros::Time(); //设置时间戳为ros::time(),允许请求TransformListener取得最新的变换数据。
//just an arbitrary point in space
laser_point.point.x = 1.0;
laser_point.point.y = 0.2;
laser_point.point.z = 0.0;
//最后,设置具体点,比如x:1.0,y:0.2,z:0.0
try{
geometry_msgs::PointStamped base_point;
listener.transformPoint("base_link", laser_point, base_point);
// 通过TransformListener对象,调用transformPoint(),填充三个参数来进行数据变换。
// 第1个参数,代表想要变换到的目标坐标系。
// 第2个参数填充需要变换的原始坐标系的点对象。
// 第3个参数填充,目标坐标系的点对象。
// 在函数调用后,base_point里存储的信息就是变换后的点坐标。
ROS_INFO("base_laser: (%.2f, %.2f. %.2f) -----> base_link: (%.2f, %.2f, %.2f) at time %.2f",
laser_point.point.x, laser_point.point.y, laser_point.point.z,
base_point.point.x, base_point.point.y, base_point.point.z, base_point.header.stamp.toSec());
}
catch(tf::TransformException& ex){
ROS_ERROR("Received an exception trying to transform a point from \"base_laser\" to \"base_link\": %s", ex.what());
}
}
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_listener");
ros::NodeHandle n;
tf::TransformListener listener(ros::Duration(10));
//we'll transform a point once every second
ros::Timer timer = n.createTimer(ros::Duration(1.0), boost::bind(&transformPoint, boost::ref(listener)));
ros::spin();
}
运行两个节点 ,打印的结果
[ INFO] 1248138528.200823000: base_laser: (1.00, 0.20. 0.00) -----> base_link: (1.10, 0.20, 0.20) at time 1248138528.19
[ INFO] 1248138529.200820000: base_laser: (1.00, 0.20. 0.00) -----> base_link: (1.10, 0.20, 0.20) at time 1248138529.19