ads1118实现热电偶测温
文章目录
- ads1118实现热电偶测温
- 前言
- 一、什么是热电偶和测温原理?
- 二、热电偶测温过程
-
- 1.使用的基本公式和流程:
- 2.ADS1118读取数据:
- 3.温度转换
前言
ads118实现热电偶测温。内容包括:了解热电偶的基本原理;ads1118的adc转换及原理;实现电偶测试;滤波算法
一、什么是热电偶和测温原理?
热电偶测温采用热效应的原理。当有两种不同的导体或半导体A和B当两端相互连接时,只要两个节点之间的温度不同,就会形成一个电势,分别称为冷端和工作端。因此,为了实现一个完整的热电偶测量过程,我们需要测量工作端ADC冷端的温度值。
二、热电偶测温过程
1.用到的基本公式及基本流程:
2.ADS1118读取数据:
ADS1118的通讯接口是SPI,SPI的通讯原理及过程就不在这里赘述了。ADS1118内部集成东西比较多,内部温度、可编程运放、16位的ADC,并且设置过程比较简单,里面只有一个寄存器。 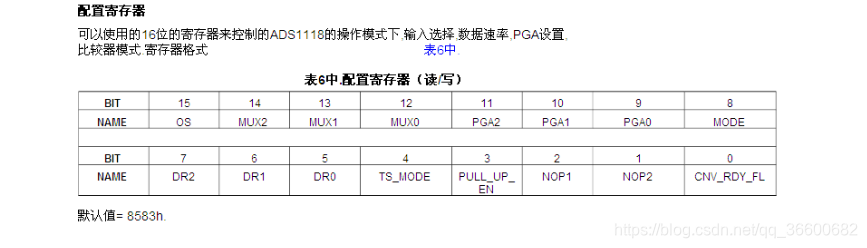实现代码如下:
//read once to get data
/********************************************************* * @function Ads1118_ReadData_one * @role 读取一组数据 * @input none * @output none * @return none ********************************************************/
void Ads1118_ReadData_one(unsigned int* ReadBDate)
{
unsigned int temp,temp1,temp2;
ads_spi_sck_off();
ads1118_delay(10);
ads_spi_cs_off();
ads1118_delay(50);
if(FistEn==1)//the fist time no data to conver
{
if(ads_spi_do()==1)while(ads_spi_do());
}
else
{
FistEn=1;
}
temp1=Ads_SpiReadU16(0x8ffb);//T command now is AD,and next is T
//temp1=ReadU16(0x8f9b);//T command now is AD,and next is T
ReadBDate[0]=temp1;
ads_spi_cs_on();
//temp=ReadU16(0xffff);
ads1118_delay(50);
ads_spi_sck_off();
ads1118_delay(10);
ads_spi_cs_off();
if(ads_spi_do()==1)while(ads_spi_do());
temp2=Ads_SpiReadU16(0x8feb);//AD command now is T,and next is AD 0x8feb
//temp2=ReadU16(0x8f8b);//AD command now is T,and next is AD
ReadBDate[1]=temp2;
ads_spi_cs_on();
ads1118_delay(50);
ads_spi_sck_off();
ads1118_delay(10);
ads_spi_cs_off();
if(ads_spi_do()==1)while(ads_spi_do());
temp2=Ads_SpiReadU16(0xBfeb);//AD command now is T,and next is AD,start ant2
ReadBDate[2]=temp2;
ads_spi_cs_on();
}
/********************************************************* * @function Ads1118_ReadData * @role 读取一次数据 * @input none * @output 通道2的adc,内部温度,通道1的adc * @return none ********************************************************/
unsigned int Ads1118_ReadData(unsigned int* ReadBDate)
{
char i ,j;
int Data_1[DataCout];
int Data_2[DataCout];
int Data_3[DataCout];
unsigned int TemData[3];
long temd;
//unsigned int dataCou=20;
for(i=0;i<DataCout;i++)
{
Ads1118_ReadData_one(TemData);
Data_1[i] = TemData[0];
Data_2[i] = TemData[1];
Data_3[i] = TemData[2];
}
for(i=DataCout-1;i>0;i--)
{
for(j=0;j<i;j++)
{
if( Data_1[j+1] > Data_1[j] )
{
TemData[0] =Data_1[j+1];
Data_1[j+1] =Data_1[j];
Data_1[j] =TemData[0];
}
}
}
temd=0;
for(i=0;i<(DataCout-6);i++)
{
temd+=(long ) Data_1[i+3];
}
ReadBDate[0]=temd/(DataCout-6);
//ReadBDate[0]=Data_1[5];
for(i=DataCout-1;i>0;i--)
{
for(j=0;j<i;j++)
{
if(Data_2[j+1]>Data_2[j])
{
TemData[1] =Data_2[j+1];
Data_2[j+1] =Data_2[j];
Data_2[j] =TemData[1];
}
}
}
temd=0;
for(i=0;i<(DataCout-6);i++)
{
temd +=(long )Data_2[i+3];
}
ReadBDate[1]= temd/(DataCout-6) ;
for(i=DataCout-1;i>0;i--)
{
for(j=0;j<i;j++)
{
if(Data_3[j+1]>Data_3[j])
{
TemData[1] =Data_3[j+1];
Data_3[j+1] =Data_3[j];
Data_3[j] =TemData[1];
}
}
}
temd=0;
for(i=0;i<(DataCout-6);i++)
{
temd +=(long )Data_3[i+3];
}
ReadBDate[2]= temd/(DataCout-6) ;
//ReadBDate[1]=Data_2[5];
return 0;
}
3.温度转换
代码如下:
/********************************************************* * @function Conver_to_T * @role传感器热电偶温度转换 * @input none * @output none * @return none ********************************************************/ long Conver_to_T(unsigned int coldJT,unsigned int TU,unsigned char Dire) { unsigned int i;//,GetT; long GetT; unsigned int ColdJU,NewTU; ColdJU=ThermocoupleCV[(coldJT/100)+1]+(coldJT%100+1)*4/10;// (coldJT%100)/40*100 if(Dire)NewTU=ColdJU+TU; //positive voltage else //negative voltage { if(ColdJU>=TU) { NewTU=ColdJU-TU; } else { NewTU=TU-ColdJU; } } if(NewTU>50) { GetT=NewTU/50; } else { GetT=0; } if( (Dire==0) && (ColdJU<TU) ) //<0 { for(i=GetT;(NewTU>ThermocoupleCV_Cold[i]);i++); if(i==0) i++; GetT=i-1; GetT*=100; GetT+=( NewTU-ThermocoupleCV_Cold[i-1] )*100 / ( ThermocoupleCV_Cold[i]-ThermocoupleCV_Cold[i-1] ); //make it's valuse close to device only. It could be delete,if want to more close to real. GetT+=(i-1)/2; GetT+=50; // e=ax+y;a=0.5,b=0.5 //make it's valuse close to device return GetT; //real T*100 } else { for(i=GetT;(NewTU>ThermocoupleCV[i]);i++); if(i==0) i++; GetT=i-1; GetT*=100; GetT+=( NewTU-ThermocoupleCV[i-1] )*100 / ( ThermocoupleCV[i]-ThermocoupleCV[i-1] ); //make it's valuse close to device only. It could be delete,if want to more close to real. GetT+=(i-1)/100*10; if(GetT>=50)GetT-=50; // e=ax+y;a=1,b=-0.5 //make it's valuse close to device return GetT; //real T*100 } } /********************************************************* * @function RegValueToTemp * @role 传感器值转换最终温度 * @input none * @output none * @return none ********************************************************/ int RegValueToTemp(unsigned int RegValueCodeT,unsigned int RegValueADC) { unsigned int McoldJT=0,MJU=0,tem=0; int RealT=0; RegValueCodeT>>=2; RegValueCodeT&=0xfff0; tem=RegValueCodeT*3;//conver to T number *100 /* 数据只有14位且左对齐 0.03125约等于0.03 */ McoldJT=tem; if(RegValueADC&0x8000) { RegValueADC=~RegValueADC; RegValueADC=RegValueADC+2; RegValueADC&=0x7fff; // tem-=(long)RegValueADC*781/40; // tem-=5; // tem/=10; / negative voltage //new conver //McoldJT+=50; //McoldJT/=100; MJU=((long)RegValueADC*781+50)/100; RealT=Conver_to_T(McoldJT,MJU,0); //had real T*100 } else { // tem+=(long)RegValueADC*781/40;//AdData[0]*700/40 // tem+=5; // tem/=10; / //positive voltage //new conver //McoldJT+=50; //McoldJT/=100; MJU=((long)RegValueADC*781+50)/100; RealT=Conver_to_T(McoldJT,MJU,1); //had real T*100 } return RealT; }
最后附上stm32的spi驱动参考:
void ads1118_delay(unsigned char i)
{
i=i*10;
while(i--);
}
/********************************************************* * @function GpioCfg * @role 配置管脚 * @input none * @output none * @return none ********************************************************/
static void GpioCfg_out( GPIO_TypeDef* GPIO,uint32_t Pin)
{
GPIO_InitTypeDef GPIO_InitStruct = {
0};
GPIO_InitStruct.Pin = Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIO, &GPIO_InitStruct);
}
/********************************************************* * @function GpioCfg * @role 配置管脚 * @input none * @output none * @return none ********************************************************/
static void GpioCfg_int( GPIO_TypeDef* GPIO,uint32_t Pin)
{
GPIO_InitTypeDef GPIO_InitStruct = {
0};
GPIO_InitStruct.Pin = Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIO, &GPIO_InitStruct);
}
/********************************************************* * @function ads1118_ioCnofig * @role 管脚配置初始化 * @input none * @output none * @return none ********************************************************/
void ads1118_ioCnofig(void)
{
ADS_SPI_CS_PIN_CLK_EN();
ADS_SPI_DI_PIN_CLK_EN();
ADS_SPI_DO_PIN_CLK_EN();
ADS_SPI_SCK_PIN_CLK_EN();
GpioCfg_out(ADS_SPI_CS_PIN);
GpioCfg_out(ADS_SPI_DO_PIN);
GpioCfg_out(ADS_SPI_SCK_PIN);
GpioCfg_int(ADS_SPI_DI_PIN);
}
/* #define ads_spi_cs P2.1 #define ads_spi_di P2.2 #define ads_spi_do P14.7 #define ads_spi_sck P2.0 */
/********************************************************* * @function Ads_SpiReadU16 * @role spi的时序 * @input none * @output none * @return none ********************************************************/
unsigned int Ads_SpiReadU16(unsigned int Cmd)
{
char i;
unsigned int temp=0;
for(i=0;i<16;i++)
{
temp<<=1;
ads_spi_sck_on();
if(Cmd&0x8000)ads_spi_di_on();
else ads_spi_di_off();
ads1118_delay(10);
ads_spi_sck_off();
if(ads_spi_do())temp|=1;
ads1118_delay(10);
Cmd<<=1;
}
return temp;
}
最后要说明一下:我这里只加了中值滤波算法,实际产品中还会加入惯性滤波算法,使显示结果更加平稳。