计算机视觉技术和图像处理技术的发展促进了三维测量技术的进步。基于计算机视觉的三维信息获取技术已成为当前三维测量的主流技术解决方案,光学测量迅速成为三维测量技术的热门研究内容。本文将介绍三维测量技术在工程应用中与传统测量方法相比的优点,重点介绍结构光测量技术的原理和特点。
假如不想看长文,下图是本文结论的简要介绍。
1三维测量技术概述
1.1三维测量技术的发展
接触式三维扫描仪是最早开发的三维扫描产品。它通过具有一定伸缩和旋转能力的机械探针接触被测物体的表面,恢复物体的表面形状。其突出的优点是不受环境光的干扰。三坐标测量仪是早期接触式三维扫描仪的代表产品。但接触式三维测量技术不能满足不能近距离接触、表面柔软或接触损坏物体的扫描要求,速度较慢。因此,非接触式三维测量技术的发展成为必然,被测物体的深度信息获取方式发生了本质的技术变化。
光学测量法是一种具有代表性的非接触式三维测量法。目前常用的光学三维测量方法有摄影测量、飞行时间、结构光、立体视觉等。测量技术方案可分为被动测量法和主动测量法。被动测量方法通过接收物体表面反射的环境光获取三维信息,因此必须在一定的光条件下工作。主动测量法投射含有特定信息的光源,可在任何光照环境下工作,因此受环境因素影响较小,更适合实际操作。基于结构光技术和基于激光技术的两种测量方案均属于主动式光学测量法,两者都是当前三维扫描产品的主流技术方案。
1.2三维测量技术的优点
与传统的测量工具相比,三维扫描仪在建筑施工中用于几何质量检测,具有以下优点:
(1)数据处理量大:通过三维扫描仪的测量,可以获得施工现场的大空间三维数据,设置多个测量站或调整测量角度,基本覆盖空间内的所有物体。同时,与尺子、垂直线、简单激光测量工具等传统测量工具相比,三维扫描仪可以获得空间中所有物体的连续三维数据,可以覆盖整个施工表面。
FARO FOCUS激光扫描仪系列主要针对AEC该系列激光扫描仪用于行业的应用和研发。表1简要介绍了三种产品,说明三维激光扫描仪具有数据处理量大的优点。
1.
2.
表1 FARO FOCUS三维激光扫描仪参数系列
(2)数据精度高:目前三维扫描仪的精度为毫米级,如表1所示,FARO FOCUS三维激光扫描仪测距25m范围内的误差为2mm。借助专业软件,读取数据的精度不亚于人工测量,仪器内部系统具有自动校正功能。采集自动三维扫描仪的数据可以避免人工测量中的操作错误和人工测量带来的错误。
(3)适用性:地面、手持三维扫描仪一般适用于室内外低层测量,如果无人机配备三维扫描系统,测量高度将上升到100米以上,测量范围将覆盖整个建筑外观,可获得整个建筑立面和顶部三维数据,主要依靠传统的手动测量仪器无法实现。同时,扫描设备可以取代危险施工区域的数据测量,大大保证了检测人员的安全。
(4)数据交互性强:三维扫描仪获得的点云数据,经点云拼接、切割、降噪等处理后,获得对象完整、精度高的表面三维信息,可逆向构件三维模型,同时粘贴纹理,使其具有材料属性。此外,点云模型数据可转换为各种格式,可与各种常用的三维处理软件和建筑设计软件兼容。因此,通过三维扫描仪获得的竣工BIM模型数据具有很高的交互性。
2结构光三维测量技术概述
2.1结构光三维测量原理
基本结构光测量系统的组件是一组投影仪、摄像头和计算系统。其基本原理是投射仪将含有特定信息的光源投射到被测物体表面,如常用的正弦相位图,经由被测物体调制,再由成像系统摄像头捕获经过调制后的光信息;计算系统根据标定出的空间方向、位置参数分析特定光源信息前后的变化,再根据三角测量原理计算特征点与摄像机镜头主点之间的距离,从而获取物体的空间位置信息。此外,对物体初始相位的解决方案是点对点操作。原则上,某一点的相位值不受相邻点光强度值的影响,以避免因物面反射率不均匀或观察视角偏差而引起的误差。测量精度可达到等效波长的几十分之一到几百分之一。
1.
图1 结构光技术原理示意图
因此,结构光测量系统不需要依靠被测物体本身的颜色和表面纹理信息来获取被测物体的表面三维信息。在基础结构光测量系统上,添加彩色相机可以获得被测物体的表面颜色,并在构建物体或场景的三维模型表面进一步完成材料映射(Texture Mapping),最终重构的三维模型包含完整的表面三维信息、材料纹理和颜色特征信息。
2.2结构光技术分类
结构光技术可分为点结构光、线结构光和面结构光。
单点结构光是一种早期的技术方案,也是最简单的三角形测量方法。将单束光源投射到被测物体的表面,测量系统每次只能处理一个光点,测量速度较慢。在单点结构光技术中,发展成多点结构光,具有较高的测量速度和精度。
线结构光测量系统投射平面狭缝光,在被测物体表面形成光条并发生畸变,可反映被测物体的深度信息。
表面结构光技术是目前最常用的,投射的光源包含二维图案。经过近几十年许多学者的研究,二维图案被称为编码结构光技术,从简单的重复到各种具有特定变化规律的条纹图案。自20世纪80年代以来,学者们开始研究编码结构光技术。经过不断的优化、改进和创新,旨在减少图案数量,提高解码效率,提高一定工作距离内的测量精度。编码结构光技术已形成多个分支,其编码方法可分为时间编码、空间编码、直接编码、相移法、频域编码等。
空间编码法只需投射一个编码图案,每个特征点都会利用其领域内像素点的信息。空间编码法主要分为De brujin序列编码、M-arrays有三种图案编码和非正式编码。空间编码法支持动态三维测量。
a) 彩色De Brujin序列编码 &nsp; b) 彩色M-arrays图案编码
图2 空间编码法
时间编码法所投射的编码图案根据时间发生变化,不同的图案按时间顺序由投射仪依次投向被测物体。常见的形式有二进制编码、n-array编码、格雷码结合相移法等。
a) 不同频率的二进制编码图案
b) 格雷码编码图案
(c)格雷码结合相移法编码图案
图3 时间编码法
直接编码法所创建的图案可以使每个像素用其颜色信息进行标记。相移法将正弦光栅投影到被测物体表面上,被测物体的高度导致图案相对于投影像素变形,即相位偏差,该相位偏差提供被测物体的三维信息。
频域编码常用的有基于傅里叶变换轮廓术与小波变换轮廓术两种方法,将投射到物体表面的光栅图案在其空间频域以及空间信号域中进行相应的变换和处理,支持动态三维测量。
目前商业三维扫描仪产品多未能支持动态物体的三维信息获取。但结构光测量技术因其快速测量与解析计算技术,同时支持实时和动态三维测量,已常见于机器人领域,支持机器人的移动识别功能。
2.3 结构光技术的应用前景
机器视觉是人工智能的一个重要的研究课题,拥有强大的二维、三维信息的辨别能力,可以代替人眼完成多种高精度的检测和判断。深度感知技术是机器视觉的重要研究内容,结构光技术、飞行时间法 (Time of Flight, ToF) 是当前业内热门的深度感知技术方案,相比之下,结构光技术拥有更广阔的研究与应用前景。
结构光技术经过几十年的发展,已经逐渐搭载于多种生活常用设备,而不仅仅是工业级应用仪器。微软公司在2010年6月推出的3D体感摄像机Kinect 1代,是结构光技术产品进入消费市场的标志性产品,其深度传感器由Primesense公司的结构光技术提供支持。Kinect研发的最大目标功能是支持体感游戏,极大地提高游戏玩家的互动性体验,其销售量曾创下吉尼斯世界纪录,Kinect的成功引起了业界对结构光传感技术研发与关注。苹果公司于2013年11月收购Primesense公司,在2017年9月发布的智能手机iPhone X推出了基于点阵结构光的人脸识别技术,即Face ID,首次将结构光技术引进智能手机行业中。Face ID技术通过点阵投射器向人脸投射三万多个点,准确地计算人脸深度信息,其人脸识别的精确度比红外人脸识别技术高得多、安全性强,并且可以在黑暗环境下完成人脸识别解锁。而后,基于结构光技术的人脸识别功能在智能手机行业掀起了一股热浪,推进了手机制造商对人脸识别系统的研发。
图4 iPhone X人脸识别系统结构光模组
2018年2月,孵化于中国科学院重庆研究院云从科技企业推出3D结构光人脸识别技术,是我国在人脸识别技术上的重大突破。未来,由结构光技术与区块链加持的物联网,将为社会各重要行业与领域的安全性能提供支持与保障。随着3D视觉产业的发展,结构光技术将搭载在更多的仪器与设备上,在商业场景、生活场景上有更丰富的应用。
3 其他常见三维测量技术介绍
3.1 激光测量技术
1999年,第一台三维激光扫描仪面世,其以地面架立式固定进行作业,被称为地面激光扫描仪。三维激光扫描技术的研究与应用进入了快速发展阶段。
三维激光测量技术的测量原理可分为三大类:飞行时间法、相移法和激光三角测量。
飞行时间法的基本原理是通过检测激光投射器所发射的光脉冲被物体表面反射回来的时间,得到被测物体表面与扫描仪发射中心之间的距离为c*t/2,c为光速,t为光脉冲运动时间。光传播1毫米的距离只需⅓×10-11秒,在大多数三维测量应用中,达到毫米级的精度是基本要求。因此,决定测量精度的关键是时间检测的准准度。飞行时间法可支持千米级别的测量距离。
相移法所发射的光脉冲经过一定的相位调制。在检测光脉冲的传播时间的基础上结合相移以测量三维信息。经过调制的光脉冲由被测物体反射后形成相移,解析相移与标准相的差异可获取被测物体的表面三维信息。与飞行时间法相比,相移法具有更高的测量精度,但由于相移检测的距离限制,相移法适合于小范围的测量。
激光三角测量法:激光投射到被测物体表面后,投射器、激光光点、摄像机之间形成一个空间三角形。投射器和摄像机的距离以及角度都是可确定的,被测物体不同的表面深度在摄像机画面中的位置不同,根据几何关系即可计算出被测物体与扫描仪发射中心之间的距离,从而获取被测物体表面深度信息。
3.2 摄影测量法
从20世纪中叶开始,摄影测量法开始被广泛使用。摄影测量法通过摄像机采集具有一定重复率的二维照片,经过如Microsoft Photosynth和Agisoft Photoscan等商业软件的处理,可实现照片的自动配准并构建三维模型。通过摄影测量法构件的三维模型包含语义信息,在工程应用上对于通过图像内容提取竣工语义信息(即进度、生产率、质量和安全)非常有效。近景摄影测量、地面摄影测量、航空摄影测量是常见的三种摄影测量技术。测量目标距离在300米内称为近景摄影测量,对于工程应用,一般采用近景摄影测量与地面摄影测量。航空摄影测量一般以无人机为载体,更多服务于地理信息系统 (Geography Information System,GIS) 与土地信息系统 (Land Information System,LIS)。
摄影测量技术通过解析二维照片获取三维信息,解析过程涉及到多个二维与三维坐标系统的转换,其基本原理是根据同名像点在不同照片中的位置,计算其在空间中的位置。摄影测量法可采用普通数码相机完成,但是成像效果较低,研究应用上一般采用专业量测摄像机。摄影测量技术精度的影响因素,除了相机本身的机械部件的组装误差、性能参数(如镜头焦距、分辨率等)高低外,还有畸变校正与误差校核的准确度。
4 三维测量技术对比
摄影测量技术是应用已久并趋于成熟的三维测量技术,激光测量技术与结构光测量技术是当下主流的主动式光学测量技术,三种三维测量技术的工作原理的区别,致使产生不一样的测量条件要求、测量精度、制造成本。本节将根据各项属性与指标对比这三项三维测量技术,以展现该项技术的应用优势与发展前景。
4.1 三维测量技术对比综述
以三维激光测量技术为代表的非接触光学测量技术发展的同时,摄影测量技术已较为成熟。许多学者对三维激光测量技术与摄影测量技术进行了对比,总结三维激光测量技术应用与发展的必要性,同时指出当前三维激光测量技术的一些不足之处,提出该项技术的改进方向。
Zhu et al. [1]对摄影测量、视频测量、3D测距相机和激光扫描四种三维重建方法在精度、成本、便携性等方面进行了对比,针对不同的应用场景给出了三维测量方法的选择建议。Kolecka [2]、Fassi et al. [3]、Zhu et al. [1]、Golparvar-Fard et al.[4]等学者均通过实验对比了三维激光测量技术与摄影测量技术在实际应用时在数据获取、模型精度、设备成本等各个方面进行了对比。Kalyan[5]另外加入谷歌开发的项目Project Tango与两项技术一起进行比较。
另外,部分学者也对激光测量技术与结构光测量技术两项当前主流的主动式光学测量技术的多方面指标进行了对比,可为当下研究与应用时三维测量技术方案的选择提供参考。
Nahangia et al. [6]对基于结构光法的Kinect 1代和基于飞行时间法的Kinect 2代以及FARO LS840HE激光扫描仪对四个管道半径进行检测效果的比较,特征平均误差分别为18%、10%、2%。Singh et al. [7]基于医学应用对立方体、圆锥体、圆柱体和球体的标本进行扫描测试,结果表明结构光扫描仪对于涉及表面积和体积计算的应用更为精确。Jecić[8]从传感器类型、数据采集条件、测量范围、准确度、成本等各方面全面分析了两项技术的优缺点。
4.2 激光测量技术与摄影测量法的工程应用对比
(1)环境条件要求
摄影测量受外界光照影响大,曝光度直接影响测量的效果。在补充外部光照基础上,在任何情况下都要求长时间曝光和高感光度。高感光度可能导致图像嘈杂而无法完全聚焦在边缘上,可能导致图像匹配过程失败或在最终的网格模型中出错[71]。激光测量技术作为主动式光学测量技术,不需要依赖环境光源即可完成测量,同时激光抗干扰能力强,强光照也不会影响工作。
(2)测量站点数量
在地面测量应用时,激光扫描技术测量范围大,最高可达千米,同时自动扫描过程中,可覆盖水平空间360度的范围,垂直空间接近300度的范围,因此扫描作业时测站少。摄像机的聚焦能力限制了其远距离测量的能力,因此需要更多的测量站点。在室外测量作业时,激光扫描技术在该优势上体现得更明显。
(3)自动化程度
通过激光扫描获取被测物体的三维信息,可以直接得到点云模型,该过程是实时的,获取点云模型后随即可以在专业软件上进行数据的后续处理。
摄影测量法是通过二维影像建立三维模型。在获取大量的照片后,即使照片的解析过程可以由软件自动完成,但是仍然需要手动干预操作。同时,构建三维模型的过程是非常费时的,根据数据量的大小以及对准确度的要求,耗时几十分钟到几小时。
(4)制造成本
摄影测量系统的硬件成本可以参考一台专业级别的量测摄像机的硬件成本,相比一台地面式三维激光扫描仪的组件成本,摄影测量系统的成本显然低得多。同时,若要对测量精度进行提升,在硬件升级上激光测量系统比摄影测量系统所投入的成本更高。
(5)测量精度
对于测量精度问题,不同的研究给出了不同的结果。对于这两项测量技术,精度的高低除了由测量核心技术原理决定外,还受到仪器本身的硬件参数的高低、操作人员的技术水平、后期数据处理准确度等的影响。当前对于测量的精度并没有一个明确的理论上限,激光测量技术的精度普遍在毫米级,还有可提升空间。对于摄影测量技术精度的挖掘研究,美国GSI公司研制的V-STARS(Video-Simultaneous Triangulation and Resection System)近景摄影测量系统相对精度可达1/20万,V-STARS/S8在10m的测量范围内精度高达0.044mm,但该测量系统成本极高。
总结:激光测量技术与摄影测量技术是两种核心技术原理完全不同的三维测量技术,激光测量技术可以直接获取三维数据、实时构建点云模型,其测量与评估的自动化程度更高。但是,激光测量技术的应用推广并未有取代摄影测量技术的企图,至少在当下,摄影测量技术的某些应用场景是激光测量技术暂未能完成的。部分学者建议根据不同的应用场景、设备条件以及建模的要求选择更合适的测量方式,更多学者则关注摄影测量技术与激光扫描技术的集成,这将会使三维建模效果以及三维模型数据的交互性得到极大的提升。
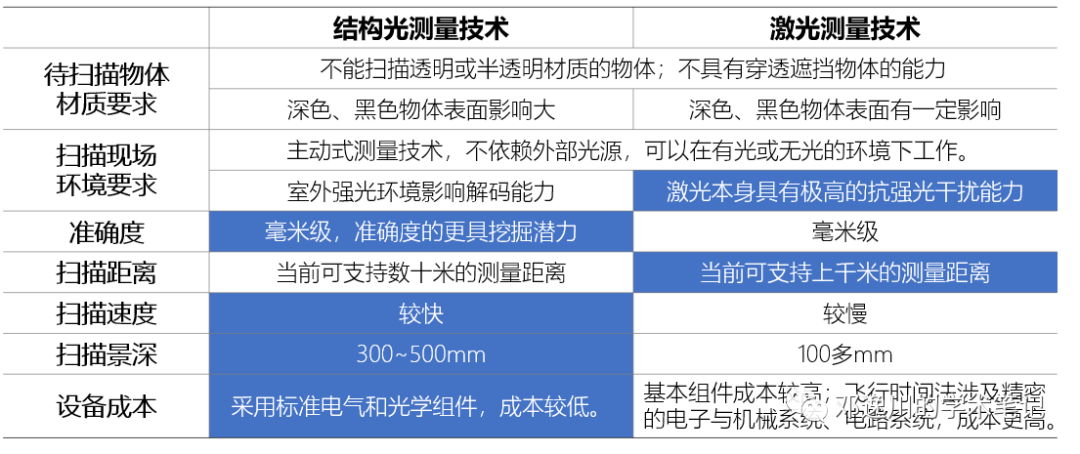
4.3 结构光测量技术与激光测量技术的工程应用对比
(1)待扫描物体材质要求
结构光测量技术与激光测量技术均属于主动式光学测量技术,因此光的性质特征直接影响到光学测量技术的普适性。不同颜色对光的反射与吸收能力、光对物体的穿透能力约束了光学扫描仪的使用。
深色表面、透明或半透明材质的物体,由于光反射能力低,难以接收清晰的反射信息以识别物体表面特征。对于深色表面,结构光技术拍摄的条纹图案对比度往往不高[58];对于接近黑色的表面将会像空隙一样,缺少相应的点云数据。对于反光材质表面,由于扫描仪无法接收有效的反射信号而扫描失败,相比激光测量技术,结构光测量技术在此方面的不足表现得更明显。对于上述问题,可以通过在物体表面涂一层显像剂而解决,其厚度几乎不影响扫描精度。另外,产品研发者已经尝试从技术上解决这些问题。
无论是结构光还是激光技术,均未能具有穿透遮挡物的能力,因此需要清理现场闲杂物,保证被测物体能够完全暴露于扫描仪视角下。
(2)扫描现场环境要求
结构光技术与激光技术均属于主动式测量技术,因此不依赖外部光源,可以在有光或无光的环境下工作。
结构光投射特定编码信息的光源到达被测物体表面后,摄像机收集该信息的畸变从而计算物体表面的深度,此过程称为解码。在室外强光环境下,因为曝光度过高会导致编码信息细节模糊,不能被摄像机完全正确识别与解析。因此结构光扫描仪对强光敏感,不适宜在室外强光环境下使用。激光测量技术主要依赖激光的反射计算物体深度,激光本身具有极高的抗强光干扰能力,因此激光扫描仪工作时完全不受强光影响。
(3)扫描准确度
结构光对投射特定编码的二维图案甚至是彩色编码图的识别计算,相比激光测量技术对光脉冲运动时间和相位变化的检测计算,可达到更高的准确度。在实际应用时,这个结论成立的前提必须是在结构光技术支持的工作范围下。激光测量技术可以支持中长距离(百米级别)的物体的测量,因为其精度取决于时间和相位检测设备的精度,扫描距离几乎无法限制其检测能力。因此,由于投射并识别特定编码图案的方法,限制了结构光技术的测量距离,结构光技术适合中短距离的使用,否则其进度将会大幅下降。激光测量技术提供具有大视野的毫米级分辨率,结构光测量技术为有限视野提供亚毫米级的分辨率[9]。但在数米的扫描距离内,结构光测量技术精度优于激光测量技术。
(4)扫描速度
结构光扫描仪向物体表面投射特定编码的二维图案,在几秒内可以得到一百多万个点,可以同时测量一个面的深度信息;激光扫描仪一次只能扫描几十毫米的狭窄平面。因此,就同一个被测物体而言,使用结构光扫描仪进行数据采集的速度更快。
(5)扫描景深
激光扫描仪的扫描深度一般只有100多毫米,结构光扫描仪则能达到300~500mm。大景深这一特点使结构光扫描仪更加适用于表面结构复杂物体的扫描,且在工程应用上,建筑结构裂缝或路面裂缝通常细长而且深度较大,难以准确测量,基于结构光技术的裂缝检测研究将会提供有效的评估方案。
(6)设备成本
激光扫描系统的基本组件为激光光源、扫描器、光学传感器和控制单元。结构光系统采用标准的电气和光学组件,例如CCD成像传感器和衍射光学元件[10],相比之下廉价得多,因此结构光扫描仪制造成本比激光扫描仪更低。
其中,飞行时间法所使用的精密电子与机械系统成本昂贵,且耐用性低,其复杂的电路系统也会带来较高的成本。当前,通过飞行时间法扫描获取的深度图分辨率较低,若要实现其分辨率的提高,也将会带来较大的硬件成本。
总结:通过对比发现,结构光扫描技术在准确度、速度、景深以及设备成本等方面均优于激光扫描技术。虽然强光以及中长距离对结构光扫描技术效果有较大的限制,进行大范围或大体积物体三维扫描时激光扫描技术更优,但是三维扫描仪对于施工进度、施工质量以及预制件的检测应用更多是室内进行的,且几乎不涉及接近百米及以上的大距离。如有必要,摄影测量技术的辅助测量将有助于克服结构光技术不适宜进行大型测量的缺点。
在商业角度而言,制造商会更倾向于生产一种能够保证使用质量的前提下技术成本更低的设备以吸引更多的产品购买者。作为企业消费者,在新技术设备的引入时,成本会是一个非常重要的考虑因素。在多项指标与属性均优于激光测量技术的前提下,基于结构光测量技术的三维扫描设备所需的制造成本更低,这将会是结构光扫描设备推广应用的一大优势。
[1] ZhuZ, Brilakis I. Comparison of Civil Infrastructure Optical-based Spatial DataAcquisition Techniques[J]. 2007.
[2] KoleckaN. Photo-Based 3d Scanning Vs. Laser Scanning – Competitive Data AcquisitionMethods For Digital Terrain Modelling Of Steep Mountain Slopes[J]. 2011.
[3] FassiF, Fregonese L, Ackermann S, et al. Comparison Between Laser Scanning AndAutomated 3d Modelling Techniques To Reconstruct Complex And Extensive CulturalHeritage Areas[J]. 2013.
[4] Golparvar-FardM, Bohn J, Teizer J, et al. Evaluation of image-based modeling and laserscanning accuracy for emerging automated performance monitoring techniques[J].Automation in Construction. 2011, 20(8): 1143-1155.
[5] KalyanT S, Zadeh P A, Staub-French S, et al. Construction Quality Assessment Using 3Das-built Models Generated with Project Tango[J]. Procedia Engineering. 2016,145: 1416-1423.
[6] NahangiM, Czerniawski T, Haas C T, et al. Pipe radius estimation using Kinect rangecameras[J]. Automation in Construction. 2019, 99: 197-205.
[7] SinghR, Baby B, Suri A, et al. Comparison of laser and structured light scanningtechniques for neurosurgery applications[C]. IEEE, 2016.
[8] JecićS, Drvar N. The Assessment Of Structured Light And Laser Scanning Methods In 3dShape Measurements[Z]. Bizovac, Croatia: 2003.
[9] ShaoJ, Zhang W, Mellado N, et al. Automated markerless registration of point cloudsfrom TLS and structured light scanner for heritage documentation[J]. Journal ofCultural Heritage. 2019, 35: 16-24.
[10] Zanuttigh P, Marin G, DalMutto C, et al. Time-of-Flight and Structured Light Depth Cameras ||[J]. 2016,10.1007/978-3-319-30973-6.