本博客旨在抑制电流谐波,提高电机系统的性能PMSM无位置传感器控制
磁链谐波和死区效应是影响电流谐波的重要因素,永磁同步电机系统中的电压误差谐波 6 倍基频的周期性扰动会导致明显的5 次和 7 目前,对抑制电流谐波的控制策略有多种,其中逆变器死区效应补充 偿还是抑制电流谐波的有效手段。文献[13]提出了自适应滤波器电压的补偿方法 d轴和 q 在轴电流中获 6 死区效应补偿电压由电压方程计算。神经网络带通滤波器和扩展卡尔曼滤波器结合的死区补偿方法,使用扩展卡尔曼滤波器改善传统死区补偿算法,利用神经网络带通滤波器提取 d轴和 q 轴电流谐波,通过死区补偿算法计算得到补偿电压,进一步提高死区补偿性能。但上述基于电压计算的死区效应补偿方法不适用于死区以外因素引起的电流谐波抑制。 重复控制、迭代学习和谐波注入方法在一定程度上有效地抑制周期性扰动引起的电流谐波。采用重复控制,引入重复模型实现周期扰动渐近跟踪,能够抑制周期扰动谐波分量,但其样本数量大且收敛速度慢。应用迭代学习结合传统比例积分(proportional integral,PI)控制抑制电流谐波,利用前一周期误差信号迭代调整当前周期控制信号,但对系统干扰敏感,鲁棒性差。谐波注入法抑制特定频率的谐波效果明显,通过谐波电流提取和谐波电压注入可显著降低 6 次转矩电流谐波。利用多同步旋转坐标转换获得 d 轴和 q 轴电流,提取基于含谐波的电流谐波 PMSM 计算补偿电压的模型分别注入 d 轴和 q 谐波抑制效果主要取决于电流谐波提取和电机模型的准确性。 谐振控制利用谐振频率的无限增益特性,在周期扰动下实现电流谐波抑制。与理想的谐振控制器相比,准谐振控制器(quasi-resonant,QR)控制器增加了谐振频率的带宽,降低了系统的频率敏感性,提高了稳定性 5 次和 7 次相电流谐波的抑制作用更适用于转速波动的电机系统。谐振控制和预测控制的组合可以获得更好的系统综合性能[18],典型的结构是比例积分谐振(proportional integral resonant,PIR)因为控制器 PI 因此,参数设计需要精确的电机参数[21],而电机参数在电机运行中会有很大的变化,谐振控制的电流谐波抑制效果必然会受到电机参数扰动因素的影响。 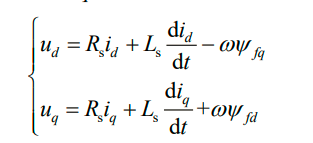 考虑谐波扰动的永磁体磁链如下所示 逆变器死区效应扰动引起的电压误差为: 式中:Δud、Δuq 分别为 d、q 轴的电压误差;Td死区时间;Udc 直流母线电压;Ts 采样时间。 (2),(3)中频率为 6nω 磁链和电压谐波的扰动会导致电流谐波。由于谐波幅值随谐波次数的增加而减小,本文重点关注 dq 坐标系下的 6次谐波。 考虑磁链和电压谐波的相电流 ia、ib 和ic 为: 相电流从上式可见 5 次和 7 次谐波的频率分别为 5ω 和 7ω,对应 dq 坐标系 6 次谐波频率为6ω。
考虑谐波扰动的永磁体磁链如下所示 逆变器死区效应扰动引起的电压误差为: 式中:Δud、Δuq 分别为 d、q 轴的电压误差;Td死区时间;Udc 直流母线电压;Ts 采样时间。 (2),(3)中频率为 6nω 磁链和电压谐波的扰动会导致电流谐波。由于谐波幅值随谐波次数的增加而减小,本文重点关注 dq 坐标系下的 6次谐波。 考虑磁链和电压谐波的相电流 ia、ib 和ic 为: 相电流从上式可见 5 次和 7 次谐波的频率分别为 5ω 和 7ω,对应 dq 坐标系 6 次谐波频率为6ω。
开始设计QRADRC
根据型(1),q 轴理想电流状态方程为: 设置状态变量 x1和 x2,x1=iq,x2=f, 本文应用于有效抑制谐振频率附近带宽范围内的谐波 QR 其传输函数为: 控制框图最重要:
随后将QRADRC使用无位置传感器:(基于反正切函数SMO)
其中QRADRC: GR(s): 实际位置及估计位置: 实际位置与估计位置的误差: 实际转速与估计转速: 实际转速与估计转速的误差: