(访问密码:3834)
总结火电厂热工自动控制技术及应用知识点
- 自动控制系统基础
-
- 概论
- 热工对象的动态特性
- 常规控制规律
-
- PID控制的特点
- 比例控制(P控制)
- 积分控制(I控制)
- 微分控制(D控制)
- 控制规律的选择:
- 单回路控制
-
- 概述
- 被控对象特性对控制质量的影响:
- 测量元件和变送器的特性对控制质量的影响
- 调节机构特性对控制质量的影响
- 整定单回路系统参数
- 串级控制
-
- 串级控制系统的组成(需绘制控制结构图)
- 串级控制系统的特点
- 串级控制系统的应用范围
- 串级控制系统的设计原则:
- 反馈控制
-
- 概述
- 静态前馈,动态前馈
- 反馈控制
- 前馈-串级控制
- 比值控制
- 分程控制
- 大延迟控制系统
-
- 常规控制补偿纯延迟的常规控制
- 预测补偿控制
- 多变量控制系统
-
- 耦合程度描述
- 解耦控制系统设计
- 火电厂热工控制系统
-
- 蒸汽锅炉蒸汽温度控制系统
-
- 过热蒸汽温度控制
- 再热蒸汽温度一般控制方案
- 蒸汽锅炉供水控制系统
-
- 概述
- 供水流量调节方法
- 供水控制基本方案:
- 供水全过程控制:
- 600MW机组供水全过程控制实例
- 控制锅炉燃烧过程控制系统
-
- 概述
- 被控对象的动态特性
- 燃烧过程控制基本方案
- 燃烧控制中的几个问题
- 单元机组协调控制控制系统控制系统
-
- 概述
- 负载指令处理回路
-
- 正常情况下,负荷指令处理
- 处理异常工况下的负荷指令
- 负载指令处理回路原理方框
- 机炉主控制器
-
- 机炉分别控制
- 机炉协调控制模式
- 直流锅炉控制系统
-
- 直流锅炉的特点
- 直流锅炉的动态特性
- 直流锅炉基本控制方案
- 直流锅炉供水控制系统
- 直流锅炉过热控制系统
如果内容有误,请在下面的评论区留言
如果发现内容有错误,请在底部留言区留言。看到就修改。. 请注意下面的信息区域,防止修改不及时
自动控制系统基础
如果发现内容有错误,请在底部留言区留言。看到就修改。. 请注意下面的信息区域,防止修改不及时
概论
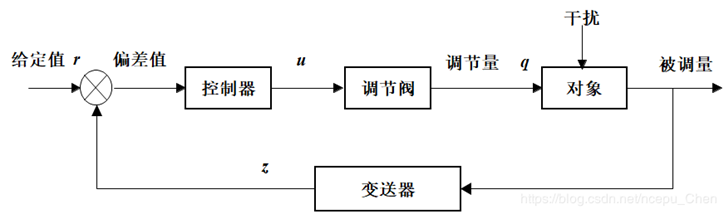
- 控制系统的组成和分类
- 控制系统的组成及术语 控制系统的四个组成部分: 被控对象、检测变送单元、控制单元、调整机构.
- 控制系统分类:
- 按结构分: 单变量控制系统, 多变量控制系统
- 按工艺参数分: 过热汽温控制系统, 主蒸汽压力控制系统
- 按任务分: 比值控制系统, 前馈控制系统
- 按装置分: 常规过程控制系统, 计算机控制系统
- 按闭环分: 开环控制系统, 闭环控制系统
- 根据不同的定值: 定值控制系统, 随机控制系统, 程序控制系统
- 过渡过程: 通过调整,直到系统重建平衡.即从一个平衡状态到另一个平衡状态的过程,即控制系统的过渡过程.
- 控制系统的组成及术语 控制系统的四个组成部分: 被控对象、检测变送单元、控制单元、调整机构.
- 控制系统的性能指标
- 衰减比 η \eta η 和 衰减率 φ \varphi φ: 衡量稳定性
- 最大偏差 和 超调量: 衡量准确性
- 调节时间 t s t_s ts: 衡量快速性
- 余差(静态偏差): 衡量静态特性
若发现内容有错误请在底部留言区留言,我看见了就修改. 也请关注下方留言区勘误,以防修改不及时
热工对象动态特性
- 有自平衡能力对象
- 一阶惯性环节: G ( s ) = K T s + 1 G(s)=\frac{K}{Ts+1} G(s)=Ts+1K
- 一阶惯性环节加纯迟延: G ( s ) = e − τ s K T s + 1 G(s)=e^{-\tau s} \frac{K}{Ts+1} G(s)=e−τsTs+1K
- 高阶惯性环节: G ( s ) = K ( T s + 1 ) n G(s)=\frac{K}{\left(Ts+1\right)^{n}} G(s)=(Ts+1)nK
- 高阶惯性环节加纯迟延: G ( s ) = e − τ s K ( T s + 1 ) n G(s)=e^{-\tau s} \frac{K}{\left(Ts+1\right)^{n}} G(s)=e−τs(Ts+1)nK
- 无自平衡能力对象
- 积分环节: G ( s ) = 1 T s = ϵ s G(s)=\frac{1}{Ts}=\frac{\epsilon}{s} G(s)=Ts1=sϵ
- 积分环节加纯迟延: G ( s ) = ϵ s e − τ s G(s)=\frac{\epsilon}{s} e^{-\tau s} G(s)=sϵe−τs
- 有积分的高阶惯性环节: G ( s ) = 1 T s ( T 0 s + 1 ) n − 1 G(s)=\frac{1}{Ts\left(T_0s+1\right)^{n-1}} G(s)=Ts(T0s+1)n−11
- 有纯迟延和积分的高阶惯性环节: G ( s ) = e − τ s T s ( T 0 s + 1 ) n − 1 G(s)=\frac{e^{-\tau s}}{Ts\left(T_0s+1\right)^{n-1}} G(s)=Ts(T0s+1)n−1e−τs
若发现内容有错误请在底部留言区留言,我看见了就修改. 也请关注下方留言区勘误,以防修改不及时
常规控制规律
PID控制的特点
-
原理简单,使用方便
-
适应性强
-
鲁棒性强
比例控制(P控制)
- 控制规律: u = K p e = 1 δ e u=K_p e=\frac{1}{\delta}e u=Kpe=δ1e; K p K_p Kp:比例增益 δ = 1 K p × 100 % \delta=\frac{1}{K_p}\times100\% δ=Kp1×100%:比例带,工程上用来描述控制作用的强弱.比例带越大,偏差越大.
- 控制特点:
- 动作快
- 有差控制
积分控制(I控制)
- 控制规律: u ( t ) = 1 T 1 ∫ 0 t e d t u(t)=\frac{1}{T_1}\int_{0}^{t} e\, dt u(t)=T11∫0tedt; G c ( s ) = 1 T 1 s G_c(s)=\frac{1}{T_1s} Gc(s)=T1s1 T 1 T_1 T1:积分时间
- 控制特点:
- 动作不及时
- 无差控制
- PI控制: I控制响应慢,工程上很少有单独使用,一般都是PI控制 控制规律: u ( t ) = K p e ( t ) + K p T 1 ∫ 0 t e ( t ) d t = 1 δ [ e ( t ) + 1 T 1 ∫ 0 t e ( t ) d t ] u(t)=K_pe(t)+\frac{K_p}{T_1}\int_0^te(t)\,dt=\frac{1}{\delta}\left[e(t)+\frac{1}{T_1}\int_0^te(t)\,dt\right] u(t)=Kpe(t)+T1Kp∫0te(t)dt=δ1[e(t)+T11∫0te(t)dt]; G ( s ) = K p ( 1 + 1 T 1 s ) G(s)=K_p\left(1+\frac{1}{T_1 s}\right) G(s)=Kp(1+T1s1) P控制看作粗调,I控制看作细调.控制作用具有: 比例及时作用和积分作用消除偏差的优点.
- 积分饱和及其措施:
- 积分饱和: ,在单方面偏差信号长时间作用下,其时,其执行机构无法再增大.
- 措施: : 当偏差较大时,在控制过程的开始阶段,取消积分作用,控制器按比例动作,等到被调量快要接近给定值时,才能产生积分作用,依靠积分作用消除静态偏差.