目录
前言
一、硬件部分
1.电磁杆
2.主控板
3.电机驱动
二、软件部分
1.舵机位置式pid
2.读入数据
3.读入数据
总结
前言
对于刚上大一的我来说,我第一次参加校级智能车比赛,从一开始就无从下手,到迹可循。本文将与大家分享我的心路历程,并进行总结。接下来,我将分为硬件(电磁杆、主板(51)、驱动器)和软件(舵机位置pid,与大家分享特殊元素的判断,出入库),
提示:以下是本文的主要内容
一、硬件部分
1.电磁杆
,顾名思义,是根据赛道上铺设的电磁线,汽车通过ADC收集电磁信号来判断汽车的当前位置,从而驱动舵机转向或电机差速转向以实现跟踪。众所周知,我们可以由电感和电容组成LC由于电磁线中交流电的频率为20,振荡电路(如图1所示)收集到信号kHZ。
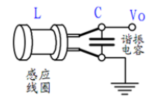
这次我们用10mH通过上述计算公式计算工字电感(市场上容易买到)可得电容约6.33nf,市场上常用的6.8nf,此时,我们完成了电磁值的采集,采集的电磁值交流微弱,因此我们使用放大电路 整流电路使其成为单片机采集的直流信号,这里不重复具体的放大电路和整流电路。以体说明后面的相应文章,使用LM358.其电路图1-1如下,采集模块如图1-2
,首先,了解我们的寻求。根据我的经验,两种电感器足以正常跟踪,其他电感器只用于判断特殊元素。当然,其他电感器也可以添加到基本跟踪中。通过加权差比和算法,其跟踪效果更加稳定。详见本文 研究智能汽车的电感差异和差加权算法。在这场比赛中,我只使用左右两个水平电感(测量稳定性),而特殊元素的判断,我使用两个内部八个电感pcb图-2为实物图
2.主控板
因为最近芯片涨价很严重,我用便宜实惠的。stc8a8k系列51单片机,对于我们的校园比赛就足够了,具体参数可以参考芯片手册,对于主控板电路这篇文章我只提供,以后有机会进行具体分析。首先,你必须了解你的需求——也就是使用什么io,如adc采集、电机驱动、舵机驱动、干簧管(检测停车)等io。二是原理图和pcb一个区域负责某一功能,便于调试和故障维护。然后是,pcb尺寸、孔位、元件包装、接线等问题(主体是电容器包装在升压和稳压电路中选择错误,破坏了主板的美观)pcb图-3为实物图(焊接)
3.电机驱动
众所周知,单片机的高电平(3-5v)输出的电流很小只能作为信号,此时我们就需要一个驱动电路,接受来自单片机的信号驱动电机。这次,我用L9110S作为驱动芯片,原因:外围电路及其简单只需一个电容滤波器,最大输出便宜实惠V1.5A符合本要求(学校指定的非常拉tt电机)原理图如下,其中6、7脚接受单片机生成的PWM14脚接输出信号。。关于PWM脉宽调制在此不赘述,后面有机会具体分析。
(0.57真香~)
总体pcb图-4的原理图如下
D7和D8为正反转显示LED
二、软件部分
1.舵机位置式pid
什么是pid?首先,我们知道PID是控制系统,pid当然,这里有很多应用,我们只是对与pid控制电机。比例、积分和微分的线性组合构成控制量u(t),称为:比例(Proportional)、积分(Integrating)和微分(Differentiation)控制,简称PID控制。比例作用P只与偏差成正比,积分作用I是偏差对时间的积累,而微分作用D是偏差的变化率。比例P代表现在,积分I代表过去,微分D代表未来。
关于PID下章介绍的具体介绍参考等部分(太多)
总结
例如:以上是今天要讲的内容,本文只简要介绍了硬件部分,注意问题:
1.电源部分PCB必须注意设计,包装,线路,反向放置
2.有些接口需要必要的标识,防震设计!