MLX90614
- 1 概述
- 2硬件电路图
- 3 程序
1 概述
MLX90614 是红外非接触温度计。TO-39 金属包装里同 红外感应热电堆探测器芯片与信号处理相结合 片。 低噪声放大器集成,17 位模数转换器和强大的数字信 实现了高精度、高分辨率的温度计。 温度计具有出厂校准化和数字化 PWM 和 SMBus(系统管理 总线)输出模式。 配置为标准 10 位的 PWM 输出格式用于连续传输温度 度范围为-20…120 ?C 物体温度的分辨率为 0.14 ?C。 POR 默认模式是 SMBus 输出格式。
2硬件电路图
插入图片描述 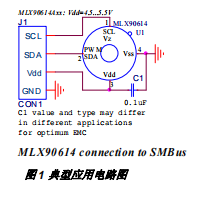 万用表使用外壳找到GND,可以根据脚位顺序确定IO准确性了。
万用表使用外壳找到GND,可以根据脚位顺序确定IO准确性了。
3 程序
#include "mlx90614.h" #include "intrins.h" /******************************************************************************* * 函数名: MLX90614 硬件GPIO初始化 * 功能 : MLX90614 完成GPIO端口初始化 * Input : None * Output : None * Return : None *******************************************************************************/ void MLX90614_Init( void ) {
__BANK_SFRB = 0; P0 = 0xff; //1000 0000 P0OE = 0xff; P0IE = 0x00; P0PU = 0xff; SMBUS_SCK_H; SMBUS_SDA_H; } /******************************************************************************* * 函数名: MLX90614 发起始位 SMBus_StartBit * 功能 : MLX90614 发起始位 产生起始位 * Input : None * Output : None * Return : None *******************************************************************************/ void SMBus_StartBit( void ) {
SMBUS_SDA_OUTPUT(); SMBUS_SDA_H; SMBUS_DELAY_5US; SMBUS_SCK_H; SMBUS_DELAY_5US; SMBUS_SDA_L; SMBUS_DELAY_5US; SMBUS_SCK_L; SMBUS_DELAY_5US; } /******************************************************************************* * 函数名: SMBus_StopBit * 功能: MLX90614 发停止位 STOP condition on SMBus * Input : None * Output : None * Return : None *******************************************************************************/ void SMBus_StopBit( void ) {
SMBUS_SDA_OUTPUT(); SMBUS_SCK_L; // Clear SCL line SMBUS_DELAY_5US; // Wait a few miroseconds
SMBUS_SDA_L; // Clear SDA line
SMBUS_DELAY_5US; // Wait a few microseconds
SMBUS_SCK_H; // Set SCL line
SMBUS_DELAY_5US; // Stop condition setup time(Tsu:sto=4.0us min)
SMBUS_SDA_H; // Set SDA line
}
/*******************************************************************************
* 函数名: SMBus_SendByte
* 功能: MLX90614 发送一个字节 Send a byte on SMBus
* Input : Tx_buffer
* Output : None
* Return : None
*******************************************************************************/
unsigned char SMBus_SendByte( unsigned char Tx_buffer ) {
unsigned char Bit_counter;
unsigned char Ack_bit;
unsigned char bit_out;
for( Bit_counter=8; Bit_counter; Bit_counter-- ) {
if( Tx_buffer&0x80 ) {
//如果最高位为1
bit_out=1; // 把最高位置1
} else {
//如果最高位为0
bit_out=0; // 把最高位置0
}
SMBus_SendBit( bit_out ); // 把最高位发送出去
Tx_buffer<<=1;// 左移一位把最高位移出去等待下一个最高位,循环8次,每次都发最高位,就可把一个字节发出去了
}
Ack_bit=SMBus_ReceiveBit();
return Ack_bit;
}
/*******************************************************************************
* 函数名: SMBus_SendBit
* 功能: MLX90614 发送一个位 Send a bit on SMBus 82.5kHz
* Input : bit_out
* Output : None
* Return : None
*******************************************************************************/
void SMBus_SendBit( unsigned char bit_out ) {
SMBUS_SDA_OUTPUT();
if( bit_out==0 ) {
SMBUS_SDA_L;
} else {
SMBUS_SDA_H;
}
SMBUS_DELAY_2US;
SMBUS_SCK_H; // Set SCL line
SMBUS_DELAY_6US;
SMBUS_SCK_L; // Clear SCL line
SMBUS_DELAY_3US;
return;
}
/*******************************************************************************
* Function Name : SMBus_ReceiveBit
* Description : Receive a bit on SMBus
* Input : None
* Output : None
* Return : Ack_bit
*******************************************************************************/
unsigned char SMBus_ReceiveBit( void ) {
unsigned char Ack_bit;
SMBUS_SDA_H; //引脚靠外部电阻上拉,当作输入
SMBUS_SDA_INPUT();
SMBUS_DELAY_2US;
SMBUS_SCK_H; // Set SCL line
SMBUS_DELAY_5US;
if( SMBUS_SDA_PIN ) {
Ack_bit=1;
} else {
Ack_bit=0;
}
SMBUS_SCK_L; // Clear SCL line
SMBUS_DELAY_3US;
return Ack_bit;
}
/*******************************************************************************
* 函数名: SMBus_ReceiveByte
* 功能: Receive a byte on SMBus 从SMBus中接受一个字节的数据
* Input : ack_nack
* Output : None
* Return : RX_buffer
*******************************************************************************/
unsigned char SMBus_ReceiveByte( unsigned char ack_nack ) {
unsigned char RX_buffer;
unsigned char Bit_Counter;
for( Bit_Counter=8; Bit_Counter; Bit_Counter-- ) {
if( SMBus_ReceiveBit() ) {
// Get a bit from the SDA line
RX_buffer <<= 1;// If the bit is HIGH save 1 in RX_buffer
RX_buffer |=0x01;//如果Ack_bit=1,把收到应答信号1与0000 0001 进行或运算,确保为1
} else {
RX_buffer <<= 1;// If the bit is LOW save 0 in RX_buffer
RX_buffer &=0xfe;//如果Ack_bit=1,把收到应答信号0与1111 1110 进行与运算,确保为0
}
}
SMBus_SendBit( ack_nack ); // Sends acknowledgment bit 把应答信号发出去,如果1,就进行下一次通信,如果为0、,就拜拜了
return RX_buffer;
}
/*******************************************************************************
* 函数名: SMBus_Delay
* 功能: 延时 一次循环约1us
* Input : time
* Output : None
* Return : None
*******************************************************************************/
void SMBus_Delay( unsigned int time ) {
// unsigned int i, j;
unsigned j;
// for (i=0; i<4; i++)
// {
// for (j=0; j<time; j++);
// }
for( j=0; j<time; j++ ) {
_nop_();
_nop_();//_nop_();_nop_();
}
//while(time--);
// _nop_();
// _nop_();_nop_();
}
/*******************************************************************************
* 函数名: SMBus_Init
* 功能: SMBus初始化
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void MLX90614_SMBus_Init( void ) {
MLX90614_Init();
}
/*******************************************************************************
* 函数名: SMBus_ReadMemory
* 功能: READ _data FROM RAM/EEPROM 从RAM和EEPROM中读取数据
* Input : slaveAddress, command
* Return : _data
* SMBus_ReadMemory(0x00, 0x07) 0x00 表示IIC设备的从地址 从0x07这个寄存器开始读取
*******************************************************************************/
unsigned int SMBus_ReadMemory( unsigned char slaveAddress, unsigned char command ) {
unsigned short _data; // _data storage (_dataH:_dataL)
unsigned char Pec; // PEC byte storage
unsigned char _dataL=0; // Low _data byte storage
unsigned char _dataH=0; // High _data byte storage
unsigned char arr[6]; // Buffer for the sent bytes
unsigned char PecReg; // Calculated PEC byte storage
unsigned char ErrorCounter; // Defines the number of the attempts for communication with MLX90614
ErrorCounter=0x00; // Initialising of ErrorCounter
slaveAddress <<= 1; //2-7位表示从机地址 从机地址左移一位,把读写位空出来
do {
repeat:
SMBus_StopBit(); //If slave send NACK stop comunication
--ErrorCounter; //Pre-decrement ErrorCounter
if( !ErrorCounter ) {
//ErrorCounter=0?
break; //Yes,go out from do-while{
}
}
SMBus_StartBit(); //Start condition
if( SMBus_SendByte( slaveAddress ) ) {
//Send SlaveAddress 最低位Wr=0表示接下来写命令
goto repeat; //Repeat comunication again
}
if( SMBus_SendByte( command ) ) {
//Send command
goto repeat; //Repeat comunication again
}
SMBus_StartBit(); //Repeated Start condition
if( SMBus_SendByte( slaveAddress+1 ) ) {
//Send SlaveAddress 最低位Rd=1表示接下来读数据
goto repeat; //Repeat comunication again
}
_dataL = SMBus_ReceiveByte( ACK ); //Read low _data,master must send ACK
_dataH = SMBus_ReceiveByte( ACK ); //Read high _data,master must send ACK
Pec = SMBus_ReceiveByte( NACK ); //Read PEC byte, master must send NACK
SMBus_StopBit(); //Stop condition
arr[5] = slaveAddress; //
arr[4] = command; //
arr[3] = slaveAddress+1; //Load array arr
arr[2] = _dataL; //
arr[1] = _dataH; //
arr[0] = 0; //
PecReg=PEC_Calculation( arr ); //Calculate CRC 数据校验
} while( PecReg != Pec ); //If received and calculated CRC are equal go out from do-while{
}
_data = ( _dataH<<8 ) | _dataL; //_data=_dataH:_dataL
//return 15500;
return _data;
}
/*******************************************************************************
* 函数名: PEC_calculation
* 功能 : 数据校验
* Input : pec[]
* Output : None
* Return : pec[0]-this byte contains calculated crc value
*******************************************************************************/
unsigned char PEC_Calculation( unsigned char pec[] ) {
unsigned char crc[6];//存放多项式
unsigned char BitPosition=47;//存放所有数据最高位,6*8=48 最高位就是47位
unsigned char shift;
unsigned char i;
unsigned char j;
unsigned char temp;
do {
/*Load pattern value 0x00 00 00 00 01 07*/
crc[5]=0;
crc[4]=0;
crc[3]=0;
crc[2]=0;
crc[1]=0x01;
crc[0]=0x07;
/*Set maximum bit position at 47 ( six bytes byte5...byte0,MSbit=47)*/
BitPosition=47;
/*Set shift position at 0*/
shift=0;
/*Find first "1" in the transmited message beginning from the MSByte byte5*/
i=5;
j=0;
while( ( pec[i]&( 0x80>>j ) )==0 && i>0 ) {
BitPosition--;
if( j<7 ) {
j++;
} else {
j=0x00;
i--;
}
}/*End of while */
/*Get shift value for pattern value*/
shift=BitPosition-8;
/*Shift pattern value */
while( shift ) {
for( i=5; i<0xFF; i-- ) {
if( ( crc[i-1]&0x80 ) && ( i>0 ) ) {
temp=1;
} else {
temp=0;
}
crc[i]<<=1;
crc[i]+=temp;
}/*End of for*/
shift--;
}/*End of while*/
/*Exclusive OR between pec and crc*/
for( i=0; i<=5; i++ ) {
pec[i] ^=crc[i];
}/*End of for*/
} while( BitPosition>8 ); /*End of do-while*/
return pec[0];
}
/*******************************************************************************
* 函数名: SMBus_ReadTemp
* 功能: 计算并返回温度值
* Return : SMBus_ReadMemory(0x00, 0x07)*0.02-273.15
*******************************************************************************/
float SMBus_ReadTemp( void ) {
float temp;
temp = ( SMBus_ReadMemory( SA,RAM_ACCESS|RAM_TOBJ1 )*0.02-273.15 );
return temp;
}
#ifndef _MLX90614_H
#define _MLX90614_H
//#include "stm8s.h"
#include "sys.h"
#define ACK 0
#define NACK 1 //不应答或否定的应答
#define SA 0x00 //从机地址,单个MLX90614时地址为0x00,多个时地址默认为0x5a
#define RAM_ACCESS 0x00 //RAM access command
#define EEPROM_ACCESS 0x20 //EEPROM access command
#define RAM_TOBJ1 0x07 //To1 address in the eeprom
#define MLX_SCL_PINS P07
#define MLX_SDA_PINS P01
#define SMBUS_SDA_PIN MLX_SDA_PINS
#define SMBUS_SDA_INPUT() do{ P0OE &= 0xfd; P0IE |= 0x02; }while(0)
#define SMBUS_SDA_OUTPUT() do{ P0OE |= 0x02; P0IE &= 0xfd; }while(0)
#define SMBUS_SCK_H MLX_SCL_PINS = 1
#define SMBUS_SCK_L MLX_SCL_PINS = 0
#define SMBUS_SDA_H MLX_SDA_PINS = 1
#define SMBUS_SDA_L MLX_SDA_PINS = 0
#define SMBUS_DELAY_1US do{_nop_();_nop_();_nop_();_nop_();\
_nop_();_nop_();_nop_();_nop_();\
_nop_();_nop_();_nop_();_nop_();\
_nop_();_nop_();_nop_();_nop_();\
_nop_();_nop_();_nop_();_nop_();\
_nop_();_nop_();_nop_();_nop_();\
}while(0)
#define SMBUS_DELAY_2US do{SMBUS_DELAY_1US;SMBUS_DELAY_1US; }while(0)
#define SMBUS_DELAY_3US do{SMBUS_DELAY_1US;SMBUS_DELAY_1US;SMBUS_DELAY_1US;\
}while(0)
#define SMBUS_DELAY_4US do{SMBUS_DELAY_1US;SMBUS_DELAY_1US;SMBUS_DELAY_1US;\
SMBUS_DELAY_1US;}while(0)
#define SMBUS_DELAY_5US do{SMBUS_DELAY_1US;SMBUS_DELAY_1US;SMBUS_DELAY_1US;\
SMBUS_DELAY_1US;SMBUS_DELAY_1US; }while(0)
#define SMBUS_DELAY_6US do{SMBUS_DELAY_1US;SMBUS_DELAY_1US;SMBUS_DELAY_1US;\
SMBUS_DELAY_1US;SMBUS_DELAY_1US; }while(0)
void SMBus_StartBit(void);
void SMBus_StopBit(void);
void SMBus_SendBit(unsigned char);
unsigned char SMBus_SendByte(unsigned char);
unsigned char SMBus_ReceiveBit(void);
unsigned char SMBus_ReceiveByte(unsigned char);
void SMBus_Delay(unsigned int);
void MLX90614_SMBus_Init(void);
unsigned int SMBus_ReadMemory(unsigned char, unsigned char);
unsigned char PEC_Calculation(unsigned char*);
float SMBus_ReadTemp(void); //获取温度值
#endif
void main( void ) {
float TEM_Value=0;
GPIO_Config_Init();
Usart0_Init();
MLX90614_SMBus_Init();
for( ;; ) {
TEM_Value = SMBus_ReadTemp();
Usart_Send_Number( TEM_Value*10,1 ); //串口发送温度显示
Usart1_Send_String( "\r\n" );
}
}