文章目录
-
- 1. 基本配置
- 2. 张量(Tensor)处理
- 3. 定义和操作模型
- 4. 数据处理
- 5. 模型训练和测试
- 6. 其他注意事项
1. 基本配置
导入包和版本查询
import torch import torch.nn as nn import torchvision print(torch.__version__) print(torch.version.cuda) print(torch.backends.cudnn.version()) print(torch.cuda.get_device_name(0)) 随机种子
在硬件设备(CPU、GPU)不同时,即使随机种子相同,也不能保证完全的可再现性。然而,在同一设备上,应确保可再现性。具体的方法是在程序开始时固定torch同时,随机种子也是numpy随机种子固定。
np.random.seed(0) torch.manual_seed(0) torch.cuda.manual_seed_all(0) torch.backends.cudnn.deterministic = True torch.backends.cudnn.benchmark = False 显卡设置
假如只需要一张显卡
# Device configuration device = torch.device('cuda' if torch.cuda.is_available() else 'cpu') 若需指定多张显卡,如0、1号显卡。
import os os.environ['CUDA_VISIBLE_DEVICES'] = '0,1' 在命令操作代码时也可以设置显卡:
CUDA_VISIBLE_DEVICES=0,1 ython train.py
清除显存
torch.cuda.empty_cache()
也可以使用在命令行重置GPU的指令
nvidia-smi --gpu-reset -i [gpu_id]
2. 张量(Tensor)处理
张量的数据类型 PyTorch有9种CPU张量类型和9种GPU张量类型。 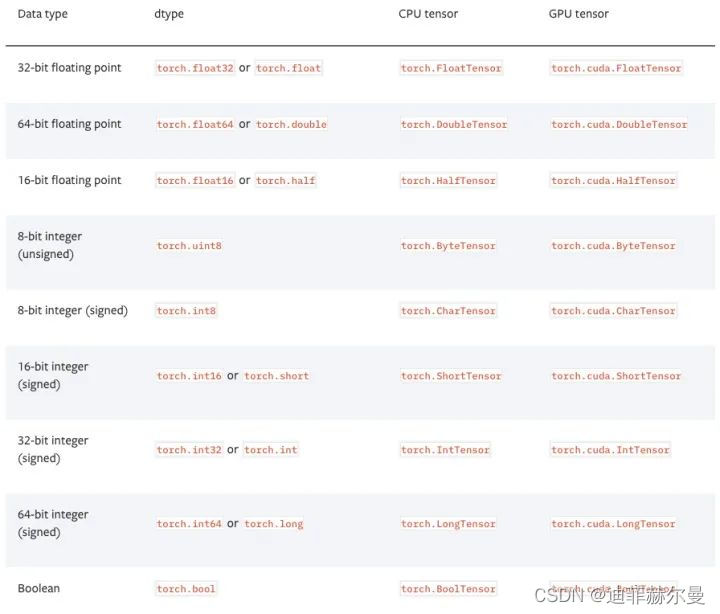 张量基本信息
张量基本信息
tensor = torch.randn(3,4,5)
print(tensor.type()) # 数据类型
print(tensor.size()) # 张量的shape,是个元组
print(tensor.dim()) # 维度的数量
命名张量 张量命名是一个非常有用的方法,这样可以方便地使用维度的名字来做索引或其他操作,大大提高了可读性、易用性,防止出错。
# 在PyTorch 1.3之前,需要使用注释
# Tensor[N, C, H, W]
images = torch.randn(32, 3, 56, 56)
images.sum(dim=1)
images.select(dim=1, index=0)
# PyTorch 1.3之后
NCHW = [‘N’, ‘C’, ‘H’, ‘W’]
images = torch.randn(32, 3, 56, 56, names=NCHW)
images.sum('C')
images.select('C', index=0)
# 也可以这么设置
tensor = torch.rand(3,4,1,2,names=('C', 'N', 'H', 'W'))
# 使用align_to可以对维度方便地排序
tensor = tensor.align_to('N', 'C', 'H', 'W')
数据类型转换
# 设置默认类型,pytorch中的FloatTensor远远快于DoubleTensor
torch.set_default_tensor_type(torch.FloatTensor)
# 类型转换
tensor = tensor.cuda()
tensor = tensor.cpu()
tensor = tensor.float()
tensor = tensor.long()
torch.Tensor与np.ndarray转换 除了CharTensor,其他所有CPU上的张量都支持转换为numpy格式然后再转换回来。
ndarray = tensor.cpu().numpy()
tensor = torch.from_numpy(ndarray).float()
tensor = torch.from_numpy(ndarray.copy()).float() # If ndarray has negative stride.
Torch.tensor与PIL.Image转换
# pytorch中的张量默认采用[N, C, H, W]的顺序,并且数据范围在[0,1],需要进行转置和规范化
# torch.Tensor -> PIL.Image
image = PIL.Image.fromarray(torch.clamp(tensor*255, min=0, max=255).byte().permute(1,2,0).cpu().numpy())
image = torchvision.transforms.functional.to_pil_image(tensor) # Equivalently way
# PIL.Image -> torch.Tensor
path = r'./figure.jpg'
tensor = torch.from_numpy(np.asarray(PIL.Image.open(path))).permute(2,0,1).float() / 255
tensor = torchvision.transforms.functional.to_tensor(PIL.Image.open(path)) # Equivalently way
np.ndarray与PIL.Image的转换
image = PIL.Image.fromarray(ndarray.astype(np.uint8))
ndarray = np.asarray(PIL.Image.open(path))
从只包含一个元素的张量中提取值
value = torch.rand(1).item()
张量形变
# 在将卷积层输入全连接层的情况下通常需要对张量做形变处理,
# 相比torch.view,torch.reshape可以自动处理输入张量不连续的情况。
tensor = torch.rand(2,3,4)
shape = (6, 4)
tensor = torch.reshape(tensor, shape)
打乱顺序
tensor = tensor[torch.randperm(tensor.size(0))] # 打乱第一个维度
水平翻转
# pytorch不支持tensor[::-1]这样的负步长操作,水平翻转可以通过张量索引实现
# 假设张量的维度为[N, D, H, W].
tensor = tensor[:,:,:,torch.arange(tensor.size(3) - 1, -1, -1).long()]
复制张量
# Operation | New/Shared memory | Still in computation graph |
tensor.clone() # | New | Yes |
tensor.detach() # | Shared | No |
tensor.detach.clone()() # | New | No |
张量拼接
'''
注意torch.cat和torch.stack的区别在于torch.cat沿着给定的维度拼接,
而torch.stack会新增一维。例如当参数是3个10x5的张量,torch.cat的结果是30x5的张量,
而torch.stack的结果是3x10x5的张量。
'''
tensor = torch.cat(list_of_tensors, dim=0)
tensor = torch.stack(list_of_tensors, dim=0)
# pytorch的标记默认从0开始
tensor = torch.tensor([0, 2, 1, 3])
N = tensor.size(0)
num_classes = 4
one_hot = torch.zeros(N, num_classes).long()
one_hot.scatter_(dim=1, index=torch.unsqueeze(tensor, dim=1), src=torch.ones(N, num_classes).long())
得到非零元素
torch.nonzero(tensor) # index of non-zero elements
torch.nonzero(tensor==0) # index of zero elements
torch.nonzero(tensor).size(0) # number of non-zero elements
torch.nonzero(tensor == 0).size(0) # number of zero elements
判断两个张量相等
torch.allclose(tensor1, tensor2) # float tensor
torch.equal(tensor1, tensor2) # int tensor
张量扩展
# Expand tensor of shape 64*512 to shape 64*512*7*7.
tensor = torch.rand(64,512)
torch.reshape(tensor, (64, 512, 1, 1)).expand(64, 512, 7, 7)
矩阵乘法
# Matrix multiplcation: (m*n) * (n*p) * -> (m*p).
result = torch.mm(tensor1, tensor2)
# Batch matrix multiplication: (b*m*n) * (b*n*p) -> (b*m*p)
result = torch.bmm(tensor1, tensor2)
# Element-wise multiplication.
result = tensor1 * tensor2
计算两组数据之间的两两欧式距离 利用broadcast机制
dist = torch.sqrt(torch.sum((X1[:,None,:] - X2) ** 2, dim=2))
3. 模型定义和操作
一个简单两层卷积网络的示例
# convolutional neural network (2 convolutional layers)
class ConvNet(nn.Module):
def __init__(self, num_classes=10):
super(ConvNet, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(1, 16, kernel_size=5, stride=1, padding=2),
nn.BatchNorm2d(16),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2))
self.layer2 = nn.Sequential(
nn.Conv2d(16, 32, kernel_size=5, stride=1, padding=2),
nn.BatchNorm2d(32),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2))
self.fc = nn.Linear(7*7*32, num_classes)
def forward(self, x):
out = self.layer1(x)
out = self.layer2(out)
out = out.reshape(out.size(0), -1)
out = self.fc(out)
return out
model = ConvNet(num_classes).to(device)
卷积层的计算和展示可以用这个网站辅助。
双线性汇合(bilinear pooling)
X = torch.reshape(N, D, H * W) # Assume X has shape N*D*H*W
X = torch.bmm(X, torch.transpose(X, 1, 2)) / (H * W) # Bilinear pooling
assert X.size() == (N, D, D)
X = torch.reshape(X, (N, D * D))
X = torch.sign(X) * torch.sqrt(torch.abs(X) + 1e-5) # Signed-sqrt normalization
X = torch.nn.functional.normalize(X) # L2 normalization
多卡同步 BN(Batch normalization) 当使用 torch.nn.DataParallel 将代码运行在多张 GPU 卡上时,PyTorch 的 BN 层默认操作是各卡上数据独立地计算均值和标准差,同步 BN 使用所有卡上的数据一起计算 BN 层的均值和标准差,缓解了当批量大小(batch size)比较小时对均值和标准差估计不准的情况,是在目标检测等任务中一个有效的提升性能的技巧。
sync_bn = torch.nn.SyncBatchNorm(num_features, eps=1e-05, momentum=0.1, affine=True,
track_running_stats=True)
将已有网络的所有BN层改为同步BN层
def convertBNtoSyncBN(module, process_group=None):
'''Recursively replace all BN layers to SyncBN layer. Args:
module[torch.nn.Module]. Network
'''
if isinstance(module, torch.nn.modules.batchnorm._BatchNorm):
sync_bn = torch.nn.SyncBatchNorm(module.num_features, module.eps, module.momentum,
module.affine, module.track_running_stats, process_group)
sync_bn.running_mean = module.running_mean
sync_bn.running_var = module.running_var
if module.affine:
sync_bn.weight = module.weight.clone().detach()
sync_bn.bias = module.bias.clone().detach()
return sync_bn
else:
for name, child_module in module.named_children():
setattr(module, name) = convert_syncbn_model(child_module, process_group=process_group))
return module
类似 BN 滑动平均
如果要实现类似 BN 滑动平均的操作,在 forward 函数中要使用原地(inplace)操作给滑动平均赋值。
class BN(torch.nn.Module)
def __init__(self):
...
self.register_buffer('running_mean', torch.zeros(num_features))
def forward(self, X):
...
self.running_mean += momentum * (current - self.running_mean)
计算模型整体参数量
num_parameters = sum(torch.numel(parameter) for parameter in model.parameters())
查看网络中的参数 可以通过model.state_dict()或者model.named_parameters()函数查看现在的全部可训练参数(包括通过继承得到的父类中的参数)
params = list(model.named_parameters())
(name, param) = params[28]
print(name)
print(param.grad)
print('-------------------------------------------------')
(name2, param2) = params[29]
print(name2)
print(param2.grad)
print('----------------------------------------------------')
(name1, param1)