文章目录
- 一、平面四杆机构的求解
-
- 方法一:几何
- 方法二:数值解
- 二、六杆机构解决方案-汽车扰流板设计
-
- E点的求解
- F点的求解
- G点的求解
- J点的求解
- H点的求解
- 运动学分析
- 项目地址
- 三、动画的绘制和输出
-
- 方法一:每次plot完之后pause一下
- 方法二:使用getframe捕获帧并用writeVideo生成动画
- 方法三:使用animatedline创建动画线(适合生成轨迹动画)
一、平面四杆机构的求解
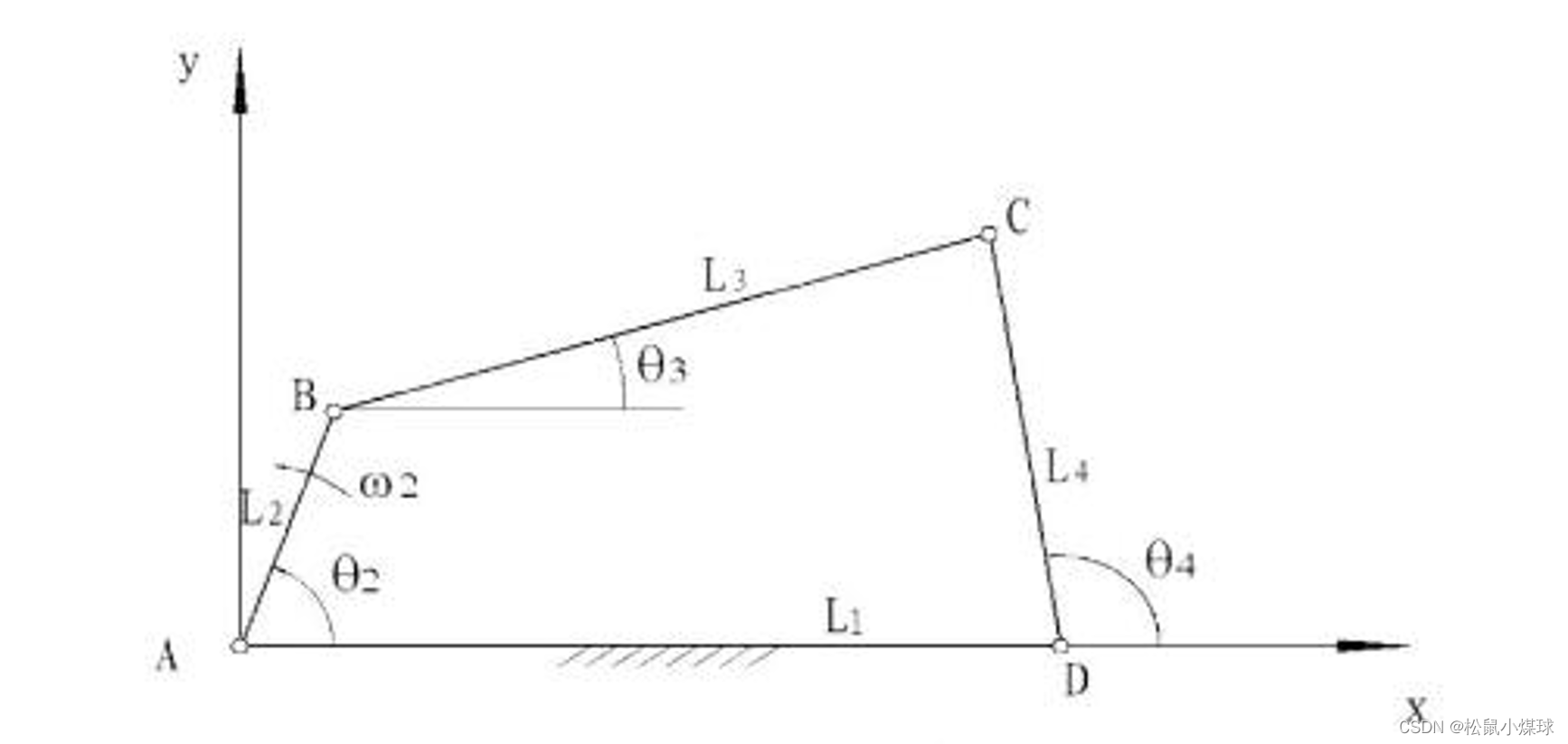
??我们可以利用两个封闭矢量多边形,建立方程: L 2 → L 3 → = L 1 → L 4 → \overrightarrow{L_{2}} \overrightarrow{L_{3}}=\overrightarrow{L_{1}} \overrightarrow{L_{4}} L2 L3 =L1 +L4 再分别投影到x轴和y轴得到分量方程: { L 2 cos θ 2 + L 3 cos θ 3 = L 1 cos θ 1 + L 4 cos θ 4 L 2 sin θ 2 + L 3 sin θ 3 = L 1 sin θ 1 + L 4 sin θ 4 \begin{cases} L_{2} \cos \theta_{2}+L_{3} \cos \theta_{3}=L_{1} \cos \theta_{1}+L_{4} \cos \theta_{4} \\ L_{2} \sin \theta_{2}+L_{3} \sin \theta_{3}=L_{1} \sin \theta_{1}+L_{4} \sin \theta_{4} \end{cases} { L2cosθ2+L3cosθ3=L1cosθ1+L4cosθ4L2sinθ2+L3sinθ3=L1sinθ1+L4sinθ4 此方程直接求解较为困难,我们有两种方法:
方法一:几何法
连接BD,解三角形
-
连接B、D,利用余弦定理可以求解出杆BD长度,进而用正弦公式求解出 φ 1 \varphi_1 φ1
-
再利用余弦公式,解三角形BCD,可得出 θ 2 \theta_2 θ2和 φ 2 \varphi_2 φ2,而 θ 3 = π − φ 1 − φ 2 \theta_3=\pi-\varphi_1-\varphi_2 θ3=π−φ1−φ2
-
B的横纵坐标由 L 2 L_2 L2和 θ 2 \theta_2 θ2给出,C的横纵坐标由 L 4 L_4 L4和 θ 4 \theta_4 θ4给出,至此平面四杆机构求解完毕。
方法二:数值解
我们已经得到了投影到x轴和y轴得到分量方程: { L 2 cos θ 2 + L 3 cos θ 3 = L 1 cos θ 1 + L 4 cos θ 4 L 2 sin θ 2 + L 3 sin θ 3 = L 1 sin θ 1 + L 4 sin θ 4 \begin{cases} L_{2} \cos \theta_{2}+L_{3} \cos \theta_{3}=L_{1} \cos \theta_{1}+L_{4} \cos \theta_{4} \\ L_{2} \sin \theta_{2}+L_{3} \sin \theta_{3}=L_{1} \sin \theta_{1}+L_{4} \sin \theta_{4} \end{cases} { L2cosθ2+L3cosθ3=L1cosθ1+L4cosθ4L2sinθ2+L3sinθ3=L1sinθ1+L4sinθ4
那么我们可以使用Matlab的optimvar以及solve函数来求解(t1即为 θ 1 \theta_1 θ1,其他类似):
xot = optimvar('xot',2); %解关节C,xot(1)为t4,xot(2)为t3
eq1 = L2*cos(t2)+L3*cos(xot(2)) == L1+L4*cos(xot(1));
eq2 = L2*sin(t1)+L3*sin(xot(2)) == L1+L4*sin(xot(1));
prob = eqnproblem;
prob.Equations.eq1 = eq1;
prob.Equations.eq2 = eq2;
x00.xot = [t1 pi/6]; %给定初值,t4初值给定与t1相同,t3初值设为pi/6
[sol,fval,exitflag] = solve(prob,x00);
t2 = x00.xot(1);
解出 θ 2 \theta_2 θ2和 θ 4 \theta_4 θ4后的坐标求解不再赘述。
二、一种六杆机构求解——汽车扰流板设计
汽车扰流板是指安装在轿车后箱盖上的类似倒装的飞机尾翼的部件。有的汽车上装有前扰流板,俗称气坝。有的汽车上侧部装有侧裙,也是扰流板的一种。后扰流板实际上它也被称为“汽车尾翼”。一方面,它使轿车外形增添了动感;另一方面,它更重要的作用是有效地减少了车辆在高速行驶时产生的空气阻力,既节省了燃料,同时也提高了车辆行驶的稳定性。一种可以做平面运动汽车扰流板的结构如下图所示:
E点的求解
C、E、D共线,故, { x 4 − x 1 = L 4 L 5 ( x 3 − x 1 ) y 4 − y 1 = L 4 L 5 ( y 3 − y 1 ) \begin{cases}x_4-x_1=\frac{L_4}{L_5}(x_3-x_1)\\y_4-y_1=\frac{L_4}{L_5}(y_3-y_1)\end{cases} { x4−x1=L5L4(x3−x1)y4−y1=L5L4(y3−y1) 解出 x 4 x_4 x4 , y 4 y_4 y4: { x 4 = L 4 L 5 ( x 3 − x 1 ) + x 1 y 4 = L 4 L 5 ( y 3 − y 1 ) + y 1 \begin{cases}x_4=\frac{L_4}{L_5}(x_3-x_1)+x_1\\y_4=\frac{L_4}{L_5}(y_3-y_1)+y_1\end{cases} { x 标签: 2x10p线对线连接器