2207231256基于物联网的智能安全监控机器人
项目摘要:
机器人是人类一直期待的,但自动化有点不同。理想情况下,机器人能做的比自动机器人想做的多得多。自动化机器人希望实现监控和制造商想要实现的另一个主要可用性,但这是很常见的。如有必要,可设置多种功能。
要制作这样一个机器人,我们需要了解电子场景中的东西,我们需要掩盖软件部分。首先,我们需要了解几乎所有的电子元件(如RasPi)、电机驱动器、摄像头模块、传感器和电池。为了控制机器人,许多编程头脑开始工作。虽然这些代码有很多限制,但我们可以使用的内存较少。代码需要简短明了。
该项目旨在开发一个可以通过网站远程控制的监控系统。它包括一个带有无线摄像头的机器人。该机器人捕获高分辨率视频源,并将其传输到控制机器人连接的本地设备。实时总结可以在设备上清楚地查看。该机器人还与多个用户兼容,因为它具有登录功能。
特征:
·无线控制机器人的最大控制范围和实现 Wi-Fi 同样多的服务器。
·网站上使用红外传感器检测障碍物和通知。
·周围环境的实时 180 视觉馈送。
·摄像机角度由网站控制。
·多个用户安全使用机器人的用户认证系统。
项目材料
硬件组件:
1.树莓派 3B x 1
2.树莓派相机模块 v1.3 x 1
3.L293D 电机驱动器 x 1
4.红外传感器模块 x 3
5.伺服马达 SG-90 x 1
6.DC Hobby 减速电机 x 2
7.电机安装件 x 2
8.脚轮 x 1
9.纤维轮 x 2
10.9V电池×1
11.移动电源 x 1
12.蜂鸣器 x 1
13.LED x 2
14.跳线
15.单股线
16.机器人底盘(3)D - 打印)
17.螺母 (M4) x 20
18.螺栓 (M4) x 20
19.小面包板 x 1
20.微型 USB 数据线
21.9V 电池连接器
使用软件:见信息包
第 1 步骤:设计机器人底盘
任何涉及从零开始构建底盘的项目(例如 3D 在打印底盘之前,有必要创建相同的模拟版本,以获得所需组件的准确尺寸和整个底盘的尺寸。
为实现此功能,AUTODESK给我们带来了一个优秀的CAD 设计软件FUSION 360。
通过使用该软件,我们可以在模拟环境中创建真实世界的对象,从而相应地设计我们的最终产品。
完全采用生产的机箱FUSION 通过精确的尺寸和测量设计360设计软件,然后输入 CURA 软件,软件反过来对应 3D 打印机生成 g 开发机箱的代码。
整个设计过程只需要两个简单的步骤:
计算机辅助设计:
步骤1 :
·我们首先根据我们的项目设计所需的所有电子元件。
·现在,我们可以从GrabCAD例如,导入某些组件RasPi板,相机模块,L293D 等待,而不是从头开始设计每个组件。https://grabcad.com
·确保您导入或设计的所有组件都与您的真实世界对象完全匹配。
第2步:
·所有组件一旦准确设计,我们现在可以进一步设计底盘。
·为了了解底盘的大小,我们首先需要有序地安排我们所有的部件和其他外围部件,以确保空间效率和部件放置的复杂性。
·一旦所有组件完全按需放置,相应地绘制底盘并将其导出到一个整体中进行最终放置 3D 打印。
我加了一切 CAD 文件。查看本地计算机上的所有文件,请打开所有文件 Fusion 360 软件中。机器人底盘的文件是机器人底盘。
机器人底盘实际上是打印和馈送的 3D 打印机底盘。所有其他步骤文件都包含单个组件 CAD 设计文件。
由于文件大小上传的限制,我无法上传最终机器人的实际文件,但我将在下面粘贴最终机器人 CAD 的浏览器链接。您可以从那里下载相同的内容。
访问 Final Robot CAD 链接:平台限制不上传
访问机器人底盘 CAD 链接:平台限制不上传
(附件:3d打印资料包 下载,由于平台限制链接插入,需要信息的同志移动微信官方账号理工充电宝
)
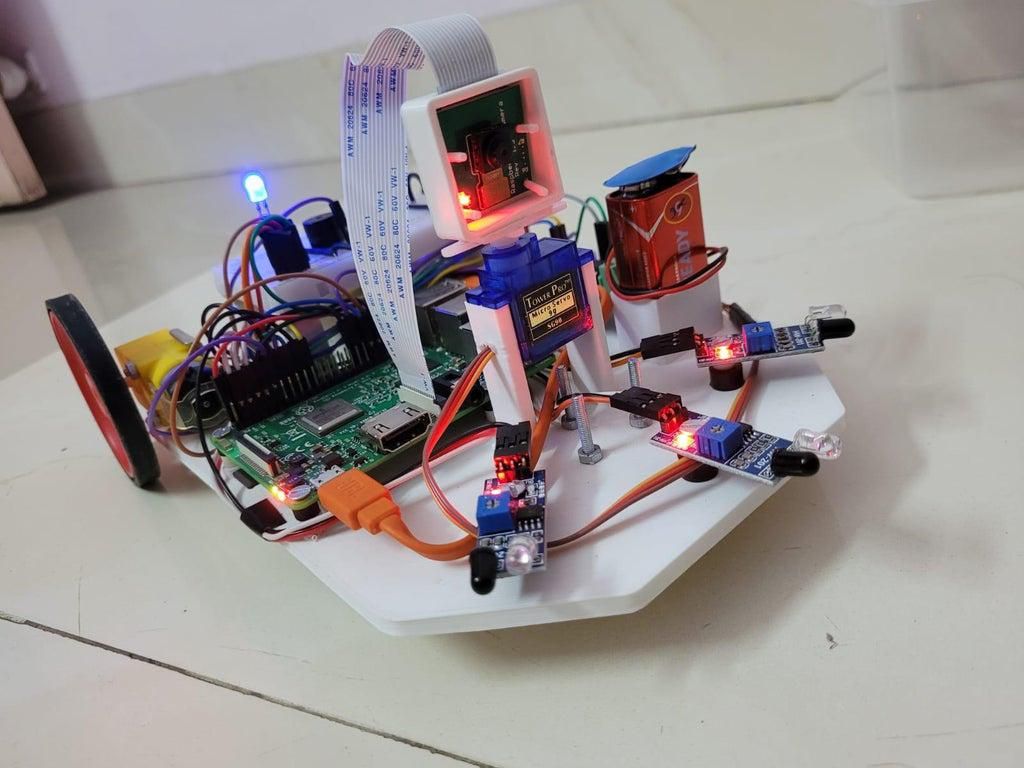
第 2 步骤:组装机器人
现在是时候开始了……!!!
现在,我们将 Bot 所需的所有组件和所有硬件部件汇集在一起,并根据我们的最终 CAD 模型相应地放置。
以下是您的 3D 打印机箱准备就绪后 Scratch 所有步骤。
让我们组装!
第 3 步骤:机车装配
整个装配部分可进一步分为三个简单部分:
1.机械运动组件
2.电子元件组装
3.电路连接
我们首先按照上述顺序从机械部分开始...
第 4 步骤:电机安装
1.如供应品 (M4) 用螺母和螺栓固定电机支架。
2.注意选择的螺栓应该有相当长的长度,因为它不应该阻碍地面和底盘之间的运动。
3.由于平顶螺栓的使用使用,因为 DC Hobby 减速电机将安装在电机支架上,安装时不会受到螺栓的阻碍。
详见下载附件 编号2207231212569
第 5 步骤:安装电机
1.用螺母和螺栓将两个直流电机安装在电机安装件上。
2.按左右电机轮毂方向安装左右电机时要小心。
第 6 步骤:安装后轮
1.用小螺钉连接两个轮子。
2.请注意,螺钉的长度和宽度应足够,以防止电机轮毂与连接轮之间滑动或相对移动。
详见下载附件 编号2207231212569
第 7 步骤:安装脚轮
1.将 360 旋转脚轮沿底盘前侧钻出的三个三角形孔固定。
2.脚轮的高度可以通过在所有三个安装螺栓上使用两个螺母和一个螺栓机构来轻松调整。
有了这个,我们的基本机械运动部件就准备好了!
详见下载附件 编号2207231212569
第 8 步骤:电子元件组装
1.所有必要的电子元件将遵循我们的要求 CAD 设计安装在机箱上。
2.以下描述了所有程序...
详见下载附件 编号2207231212569
第 9 步骤:安装红外传感器
1.三个 IR 传感器的安装方法是覆盖机器人的整个前部区域。
2.名称给出了左、右和中心传感器。
3.中心传感器和机箱 90 另外两个传感器形成角度 45 度角。
4.一些支撑塑料垫片连接到传感器底部,以增加其高度。
详见下载附件 编号2207231212569
第 10 步:RaspBerry Pi 安装
1.我们最重要的电子元件RasPi通过板本身提供的安装孔供的安装孔。
2.安装前应注意电路板的方向。
<>3.RasPi板的 GPIO 引脚侧应面向面包板安装侧,以确保轻松连接电线。详细资料见下载附件 编号2207231212569
第 11 步:L293D 电机驱动器安装
1.用于驱动和控制两个后轮方向的电机驱动器按照 CAD 设计放置在靠近 9V 电池槽的位置。
2.驱动器的方向应使电路板的 12V 和Gnd引脚应面向 9V 电池插槽,以便轻松将其与电池连接器连接。
第12步:连接伺服
1.伺服系统可自由安装在机箱上提供的两个支柱上,稍后将在其上安装摄像头模块。
2.伺服系统的电线通过其中一根柱子上的狭缝拉出。
3.然后伺服器与喇叭相连。
详细资料见下载附件 编号2207231212569
第13步:连接面包板
1.面包板安装在后端提供的底盘上的四个支柱上。
2.柱子的顶部用双面胶带覆盖。
3.然后将面包板轻轻地粘贴到四根柱子上。
详细资料见下载附件 编号2207231212569
第 14 步:装上相机模块
1.要安装在伺服系统上的相机模块首先用 3D 打印覆盖物覆盖。
2.模块的接线通过盖子上的狭缝取出。
3.然后将盖子与模块一起安装在伺服器上。
详细资料见下载附件 编号2207231212569
第 15 步:放置电源
1.在这个机器人上,使用两个电源为机器人的两个不同部分供电。
2.首先是用于为 L293D 电机驱动器供电的 9V 电池,该驱动器反过来通过连接的外部电池为电机提供所需的电流量。
3.该电池靠近驱动器放置在为其创建的特殊插槽中。
4.第二个是移动电源,用于为整个RasPi板以及连接到板的所有其他电子元件供电。
5.移动电源位于面包板下方。
6.使用两个不同的电源可在 9V 电池和电路的其余部分之间提供隔离,从而减少对我们的主微控制器板造成损坏的威胁。
这样我们就完成了我们的电子元件组装!!!
详细资料见下载附件 编号2207231212569
第 16 步:电路连接
上图描绘了与RasPi板和 L293D 电机驱动器一起显示的每个组件的整体连接图。
以上原理图是使用AUTODESK的电路设计软件EAGLE设计的。
为简单起见,我们将把电路的每个部分分解成更小的块,并首先在各个步骤中逐个连接所有连接组件。
所以让电线说话.......!!!
详细资料见下载附件 编号2207231212569
第 17 步:RaspBerry Pi 引脚图
进行连接时,请参阅此RasPi引脚分配图
详细资料见下载附件 编号2207231212569
第 18 步:电机驱动器连接
1.通过来自RasPi板的 5V 电源将 L293D 上的 5V 引脚连接到面包板上的 5V 电源线,同样将Gnd引脚连接到面包板上的Gnd线。
2.将左侧电机连接到 L293D 的 M1 和 M2 引脚,将右侧电机连接到 M3 和 M4 引脚。
3.连接 I1 ----> GPIO 18
4.连接 I2 ----> GPIO 23
5.连接 I3 ----> GPIO 24
6.连接 I4 ----> GPIO 25
7.将 9V 电池连接器连接到 L293D 板的 12V 和Gnd引脚。
详细资料见下载附件 编号2207231212569
第 19 步:红外传感器连接
1.将所有传感器的所有接地连接到RasPi板上标记的公共接地引脚。
2.通过来自RasPi板的 5V 电源连接面包板上的所有Vcc引脚。
3.连接左侧红外传感器的Vout -----> GPIO 2
4.连接中心红外传感器的Vout -----> GPIO 3
5.连接右侧红外传感器的Vout -----> GPIO 4
详细资料见下载附件 编号2207231212569
第 20 步:伺服连接
1.将 5V 连接到Breaboard 5V 电源线,并将Gnd连接到RasPi上的Gnd引脚。
2.连接信号引脚----> GPIO 26
详细资料见下载附件 编号2207231212569
第 21 步:相机模块连接
将摄像头模块的电线束连接到Raspi板上提供的摄像头连接器插槽,同时考虑电线的正面和背面。
详细资料见下载附件 编号2207231212569
第 22 步:蜂鸣器连接
1.将蜂鸣器的接地引脚连接到面包板上的接地线。
2.连接蜂鸣器正极----> GPIO 17。
3.对于面包板连接,请使用单股线。
详细资料见下载附件 编号2207231212569
第 23 步:LED 连接
1.将两个 LED 的接地连接到面包板上的Gnd线。
2.连接电源正极端子----> GPIO 21
3.连接障碍物检测 LED 正极 ----> GPIO 16
4.对于面包板连接,请使用单股线。
详细资料见下载附件 编号2207231212569
第24步:整体电路图
1.上图是机器人的整体电路连接。
2.为简单起见,您可以将 Breadboard 5V 电源线用于 +Vcc,并将RasPi板Gnd引脚用于各种传感器的Gnd连接。
详细资料见下载附件 编号2207231212569
第 25 步:为机器人供电
1.使用连接器将 9V 电池连接到电机驱动器。
2.通过微型 USB 电缆使用移动电源为RasPi板供电。
现在我们完成了我们的电子和电路部分......!!!!!!
未完待续
配套源码下载请私信,或者百度题目加资料编号
后文见(二)基于物联网的智能安防监控机器人2207231212569