导语
本文主要讲述了九轴姿态传感器中陀螺仪的部分。陀螺仪传感器允许物体在运动过程中感知水平、垂直、俯仰、航向和角速。三轴陀螺仪的工作原理见图1。旋转轴和转子不受外力的影响。利用这一特性,我们可以在物体的三维运动中提取相关的角度和角速度。
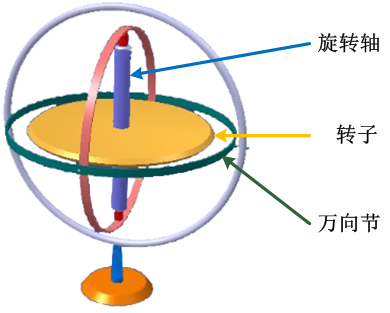
图1
角速,即单位时间内转动的弧度,其单位为每秒弧度(以下简称 度/秒);如图2所示,物体从X0/Y0/ZO转到X1/Y1/Z1可分解为三个方向轴上的角度变化,每个轴的角度变化可通过旋转另外两个轴获得。以Z轴为例,Z0到Z1的转角Az01分别在XZ平面和YZ平面上投影了Ay和Ax,也就是说Z轴在Z0方向绕Y轴旋转Ay然后绕X轴旋转Ax度,就得到了Z1方向;到此完成X/Y二轴旋转检测,最后加上Z轴周围的旋转角度Az检测三轴陀螺仪的环绕角度变化。
图2
陀螺仪的最终输出是角度的变化率,即陀螺仪的输出不是Ax/Ay/Az的角度值,而是单位时间内角度的变化,假设物体t0秒测量的三轴旋转弧分别为Ax0/Ay0/Az0,t1秒测量的三轴旋转弧度为Ax1/Ay1/Az1,则三轴角速度ωX/ωY/ωZ的值为
ωX = (Ax1-Ax0) / (t1 – t0)
ωY = (Ay1-Ay0) / (t1 – t0)
ωZ = (Az1-Az0) / (t1 – t0)
如图3所示,陀螺仪的输出与加速度计相同I2C/SPI如果接口直接输出数字,也需要通过ADC转换的模拟信号输出与12相似bit ADC例如,最大输出值为2^12-1=4095,我们定义Acx/Acy/Acz为X/Y/Z三轴角速度ADC输入值,三轴角速度可以通过以下公式获得ωX/ωY/ωZ的值
ωX = ((Acx/4095) * Vref – V0ω) / Sens
ωY = ((Acy/4095) * Vref – V0ω) / Sens
ωZ = ((Acz/4095) * Vref – V0ω) / Sens
等式中Vref参考电压,V0ω为零角速度电压值,即物体在没有任何旋转影响的情况下的输出电压(可以测量),Sens陀螺仪的灵敏度(即单位角速度变化引起的电压变化值)。
图3
文章来源:润欣科技Fortune微信公众号