Robotics:Aerial Robotics (空中机器人) (一)
week1.1 Introduction 引言
该专栏为Coursera上宾夕法尼亚大学Kumar教授的课程——Robotics:Aerial Robotics课程笔记和整理
原课程链接:https://www.coursera.org/learn/robotics-flight?specialization=robotics 知乎同文:https://zhuanlan.zhihu.com/p/480922840
Quadrotor (四旋翼)
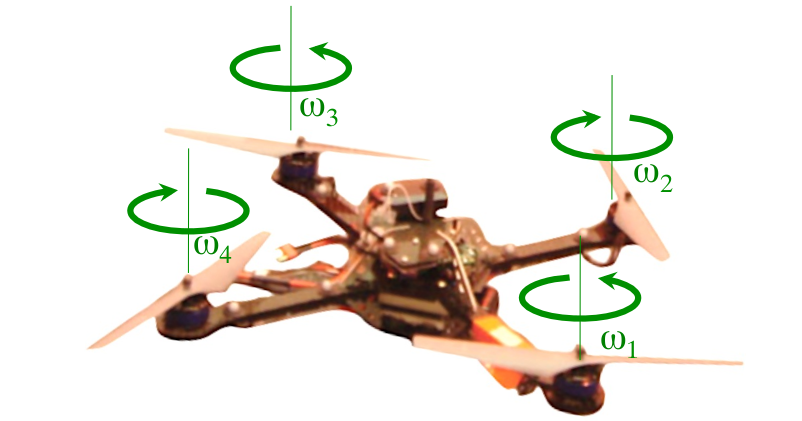
其中,电机1,3转向相同,2,4转向相同。
飞行位置和旋转可以通过改变电机转速来控制。( and )
四旋翼有六种自由度,即。
Key Components of Autonomous Flight
-
- estimate the position and velocity (including rotation and angular velocity of the robot)
-
- command motors and produce desired actions in order to navigate to desired state
State Estimation(状态估计)
可用于实验室环境,精度高(below one millimeter),实时性好(100-200 times a second)。
在GPS拒绝,没有motion capture外部传感器常用SLAM技术(imultaneous ocalization nd apping)。