智能手机或便携设备应具备Wi-Fi 和互联网功能,能够运行应用软件等诸多特征,而且一定会具有内置传感器。高端智能手机可能集成接近传感器,环境光传感器,3
轴加速度计、磁力计等传感器。 Android 2.3
添加了一些支持各种新传感器的传感器API,包括陀螺仪、旋转向量、线性加速度、重力和压力传感器。应用软件可以使用这些新的传感器来实现高精度的高级运动检测功能。
3 轴加速度计或低g 值传感器是Android API
支持特定坐标系统的支持传感器之一可以为应用程序提供标准的接口数据。坐标空间的定义与手机屏幕的默认方向有关,如图1所示。
图
1. 3 轴加速度计Android 坐标系统
在Android 坐标系统中,坐标原点位于屏幕左下角,X 轴水平指向右侧,Y 轴垂直指向顶部,Z
轴指向屏幕前方。在这个系统中,屏幕后面的坐标是负的Z 轴值。Android 加速度计数据定义为:
Sensor.TYPE_ACCELEROMETER
所有所有值SI
标准单位(m/s2)测量手机的加速度值,减去重力加速度重量。
values[0]:x 减去轴上的加速度值Gx
values[1]:y
减去轴上的加速度值Gy
values[2]:z 减去轴上的加速度值Gz
例如,当设备平放在桌子上,并将其推向左向右移动时,x
轴加速度值为正。当设备平放在桌子上时,加速度值为 9.81这是设备的加速度值 (0 m/s2) 减去重力加速度值 (-9.81 m/s2)得到的。
当设备平放在桌子上并加速时A m/s2 当向天空推进时,加速度值等于A 9.用设备加速度值( A
m/s减去重力加速度值(-9).81 m/s2)得到的。
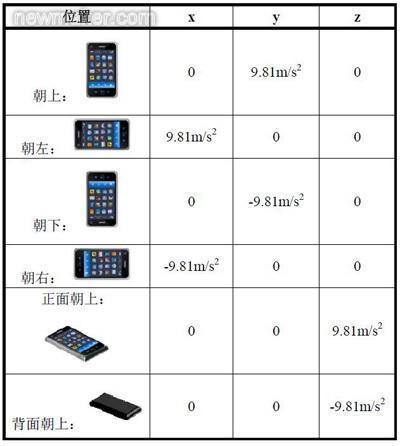
表 1
列出与设备各位置对应的传感器的加速度读数。用户可以使用下表检查加速度计的方向是否与系统坐标一致。
通过加速度传感器读取3 轴加速度值时,需要假设传感器3
轴向方向与系统坐标一致。但在实际产品中,不同的传感器芯片或安装方向可能会使用,因此数据方向也会有所不同。 飞思卡尔MMA8452Q
3 轴向加速度传感器的方向定义。
在图 2 我们可以看到,当芯片安装时,引脚1必须被允许 处于右下角的位置(PD),并安装在PCB 的前方,这样才能与Android
坐标系统的默认位置是一致的。安装后,用户可以确定数据方向与系统坐标定义一致。在任何其他情况下,数据都不能与系统定义完全一致,因此需要更改数据方向和坐标。在某些情况下,X
和Y 轴必须交换,或者改变方向和交换X-Y 轴。
判断是否需要改变方向或交换X-Y 轴的方法如下:
1.
朝上放置设备(UP)如表1所示 中所示。
2. 从传感器中读取3 如果Y 轴上的数据是 ±1 g
(±9.81m/s2)其他两个轴上的数据约为0,无需交换X-Y 轴。否则,需要交换X 和Y 轴,请转到步骤3。
2.1.
如果在这个位置Y 轴上读取的数据是 1 g ( 9.81m/s2),则Y 轴的方向不需要改变。如果数据为负,则Y 轴的方向需要改变。
2.2.
朝左放置设备(LEFT)如表1所示 中所示。X 轴上读取的数据应为±1g (±9.81m/s2)其他两个轴上的数据应该在0左右。X
轴上的数据为正,不需要改变方向;否则,X 轴的方向需要改变。然后,执行第4 步判断Z 轴的方向。
3.
设备仍然朝上(UP)从传感器中读取3的位置 此时X 轴上的数据应为 ±1 g
(±9.81m/s2)其他两个轴上的数据约为0,需要X-Y 交换。
3.1. 如果在这个位置X 轴的数据读取为 1 g
( 9.81m/s2),则X 轴的方向不需要改变;否则需要改变。
3.2. 把设备放在左边(LEFT)位置,如表1 中所示。Y
轴上读取的数据应为±1g (±9.81m/s2)其他两个轴上的数据应该在0左右。Y 轴上的数据是正的,所以方向不需要改变;否则改变。然后执行第4条 步判断Z
轴的方向。
4. 将设备放置在正面朝上(FRONT-UP)从传感器中读取3的位置 轴数据 Z轴上的数据是 1 g
( 9.81m/s2)另外两个轴上的数据约为0,则Z 轴的方向不需要改变;如果Z 轴数据为-1 g (-9.81m/s2),则Z 轴的方向需要改变。
在 Android 在系统中,传感器数据来自核心空间Linux 然后由驱动读取HAL 层驱动发送到API。分层结构如图3所示
所示Linux 驱动层或在HAL 转换层。
在 Android HAL 文件中改变 X、Y 和Z 轴的方向
在 HAL
在文件中,将从传感器中读取的加速度数据转换为标准单位(m/s2)。如下代码:
// conversion of
acceleration data to SI units (m/s^2)
#define CONVERT_A (GRAVITY_EARTH /
LSG)
#define CONVERT_A_X (-CONVERT_A)
#define CONVERT_A_Y (CONVERT_A)
#define CONVERT_A_Z (CONVERT_A)
在这个宏定义中,常量GRAVITY_EARTH
是标准重力加速度值,即9.81m/s2,LSG例如,MMA8452
正常模式下的读数为1024。CONVERT_A 将从加速度传感器中读取的数据从数字读数转换为标准重力加速度单位。
单独修改CONVERT_A_X、CONVERT_A_Y 和CONVERT_A_Z,我们可以易改变X、Y 和Z
轴的方向。如果轴的方向与系统定义相反,则可以使用(-CONVERT_A)改变它的方向。如果方向一致,则使用(CONVERT_A),保持方向不变。
位于这个宏定义FSL Android 9 (Android 2.2)驱动程序HAL文件sensor.c 中。对于FSLAndroid 10
(Android 2.3)你可以在那里libsensors’文件夹的HAL 文件Sensor.h 中找到它。
在 Android 2.2 HAL
文件中交换X 轴和Y 轴
在某些情况下,X 和Y 轴必须交换,以保持传感器数据的坐标与系统坐标一致。
对于 FSL
Android 9 (Android 2.2)驱动程序来说,X 轴和Y 轴的交换非常简单。首先,在HAL 文件sensor.c
中,在函数sensor_poll() 找到以下代码:
switch (event.code) {
case ABS_X:
sSensors.acceleration.x = event.value * CONVERT_A_X;
break;
case
ABS_Y:
sSensors.acceleration.y = event.value * CONVERT_A_Y;
break;
case ABS_Z:
sSensors.acceleration.z = event.value * CONVERT_A_Z;
break;
}
然后根据以下所示修改代码:
switch (event.code) {
case
ABS_X:
sSensors.acceleration.y = event.value * CONVERT_A_Y;
break;
case ABS_Y:
sSensors.acceleration.x = event.value * CONVERT_A_X;
break;
case ABS_Z:
sSensors.acceleration.z = event.value *
CONVERT_A_Z;
break;
}
在 Android 2.3 的HAL 文件中交换X 轴和Y 轴
在
Android 2.3 的HAL 文件中交换X 轴和Y 轴会更复杂,因为它更复杂HAL所有文件结构HAL
文件位于文件夹中libsensors’中。文件AccelSensor.cpp 需要修改两个函数。
首先,修改函数AccelSensor()的代,如下所示:
if
(accel_is_sensor_enabled(SENSOR_TYPE_ACCELEROMETER)) {
mEnabled |=
1<
&absinfo)) {
mPendingEvents[Accelerometer].acceleration.y =
absinfo.value * CONVERT_A_Y;
}
if (!ioctl(data_fd,
EVIOCGABS(EVENT_TYPE_ACCEL_Y), &absinfo)) {
mPendingEvents[Accelerometer].acceleration.x = absinfo.value * CONVERT_A_X;
}
if (!ioctl(data_fd, EVIOCGABS(EVENT_TYPE_ACCEL_Z), &absinfo)) {
mPendingEvents[Accelerometer].acceleration.z = absinfo.value * CONVERT_A_Z;
}
}
然后,修改函数processEvent()的代码,如下所示:
void
AccelSensor::processEvent(int code, int value)
{
switch (code) {
case EVENT_TYPE_ACCEL_X:
mPendingMask |= 1<
break;
case EVENT_TYPE_ACCEL_Y:
mPendingMask |= 1<
break;
case EVENT_TYPE_ACCEL_Z:
mPendingMask |= 1<
break;
}
}
完成后,X 轴和Y 轴的数据就互相交换了。
在 Kernel 驱动文件中交换X 轴和Y 轴
X 轴和Y 轴的数据交换可以在底层的Linux 驱动中,在刚开始读取传感器数据时实施。通过这种方法,无论传感器芯片以何种方式安装在PCB
中,或者使用各种不同类型的传感器,HAL 文件都可以保持一致。
对于 Android 2.2 和2.3
来说,执行该操作的最便捷的方式是修改函数report_abs()中的代码。在该函数中,传感器数据通过调用函数mma8452_read_data()读取,如下所示(当使用的传感器为MMA8452Q
时):
if (mma8452_read_data(&x,&y,&z) != 0) {
//DBG("mma8452 data read failed\n");
return; }
X 轴和Y
轴可以通过以下方式轻松交换:
if (mma8452_read_data(&y,&x,&z) != 0) {
//DBG("mma8452 data read failed\n");
return; }
对于 Android
2.2,MMA8452 的Kernel 驱动文件为mma8452.c;对于Android 2.3,驱动文件是‘hwmon’文件夹中的mxc_mma8452.c。
在 Kernel 驱动文件中改变 X、Y 和Z 轴的方向
传感器数据的方向也可以在Kernel
驱动文件中更改。以下带有注释的语句可以添加到函数report_abs()中,从而改变数据方向:
if
(mma8452_read_data(&y,&x,&z) != 0) {
//DBG("mma8452 data read
failed\n");
return;
}
x *= -1; //Reverse X direction
y *= -1;
//Reverse Y direction
z *= -1; //Reverse Z direction
input_report_abs(mma8452_idev->input, ABS_X, x);
input_report_abs(mma8452_idev->input, ABS_Y, y);
input_report_abs(mma8452_idev->input, ABS_Z, z);
input_sync(mma8452_idev->input);
总结
Android
系统已经为加速度计定义了坐标系统,因此用户必须转换从实际传感器中读取的数据,从而与其保持一致。无论是否需要转换,都应检查X、Y 和Z
轴的方向以及X-Y轴坐标。我们可以更改HAL 文件或Kernel 驱动文件来改变轴的方向,或交换X 和Y 轴,但是不要同时修改HAL 文件和Kernel 驱动。
找找