摘要:本文讨论了一种有效的模块化多电平变流器(Modular Multilevel Converter,简称MMC)基于准的换流器PR环流抑制控制策略。这种环流抑制策略可以有效地减少项目中的环流抑制策略MMC变流器阀组的二次环流对系统参数影响小,适应性强。经动模拟结果表明,该环流抑制控制策略是有效的。
1 引言
柔性直流输电技术随着风电、光伏等分布式能源的广泛应用和智能电网的发展而迅速发展。从传统的两电平电压源换流器拓扑到中性点钳位(NPC)三电平拓扑,再到模块化多电平换流器(Modular Multilevel Converter,简称MMC)它在世界范围内得到了广泛的研究和实验。尤其是最近,MMC技术在VSC-HVDC该领域更具吸引力。通过增加子模块数,该结构可以灵活地适应电压和功率等级MMC可降低开关频率,大大降低系统损耗,电压畸变小,不需要滤波器MMC技术优势明显。
2 MMC环流产生原理及控制策略
MMC拓扑结构由六个桥臂组成,其中每个桥臂由N个相互连接的子模块和一个电抗器L串联组成,上下两个桥臂形成相单元。六个桥臂对称,即各子模块的参数与各桥臂的电抗值相同。其结构如图1所示。
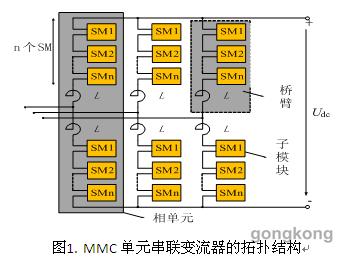
换流器中的单元并联于直流侧母线,运行时各相单元产生的直流电压难以保持严格一致,因此有环流在三相单元之间流动,MMC的各种控制方法,最终要通过控制三相6个桥臂各自的输出电压upj和unj来实现。为消除各相上下桥臂电压的不一致性,桥臂电压upj和unj同时减去一个大小等于同时减去一个大小ucirj修正量可以抵消两个串联电抗器两端之间的电压,间接控制换流器的内部电流icirj。因为这种修正是同时加载同相上下两个桥臂,所以不会影响MMC外部特征,即MMC输出的电流电压和电流不会改变。利用这一特性,设计相应的内部环流抑制控制器(Circulating Current Suppressing Controller,CCSC)。
上下桥臂电压参考值满足上述环流抑制控制器的设计要求
式中,I2f是倍频环流峰值。
综上所述,环流仅存在于换流器内部,独立于换流器外部的电源或负载。它是由各相上下桥臂电压之和不一致引起的,环流为二倍频负序性质MMC三相桥臂之间的流动对外部交流系统没有影响。虽然桥臂电抗可以抑制环流的大小,但相单元之间双频负序环流的存在仍会扭曲桥臂电流,影响电容电压的平衡控制。因此,有必要采取适当的控制策略来协调电容电压平衡和环流。
在整流和逆变控制系统中,传统的电流控制方法采用坐标变换技术,将三相静态坐标系下的电流电压等正弦量转换为同步旋转坐标系下的直流量,然后分别对齐d、q轴分量采用PI控制。然而,旋转坐标系下采用旋转坐标系PI控制要经过Clark和Park变换,而且d、q轴分量有耦合,需要解耦控制才能达到良好的控制效果,解耦不准确会对控制效果产生一定的影响。
PR控制器可实现交流输入的无静差控制。PR在网侧变换器的控制系统中,控制器可以在两相静态坐标系下调节电流。可以简化控制过程中的坐标变换,消除电流d、q轴分量之间的耦合关系,且可以忽略电网电压对系统的扰动作用。此外,应用PR控制器易于实现低谐波补偿,有助于简化控制系统的结构。
3、准PR控制策略分析
PR控制器,即比例谐振控制器,由比例环节和谐振环节组成,可实现正弦量无静差控制PR如下所示:
式中Kp为比例项系数,Kr谐振项系数,ω0是谐振频率。PR控制器中的积分环节已成为广义积分器,可实现谐振频率正弦量的振幅积分。PI与控制器相比,PR控制器可以实现零稳态误差,提高选择抵抗电网电压的干扰能力。但在实际系统应用中,PR控制器的实现主要存在以下两个问题:
由于模拟系统组件参数进度和数字系统精度的限制,理想PR控制器不易实现。
理想PR控制器在非基频处的增益很小,当电网频率偏移时,无法有效抑制电网产生的谐波,如图2所示。
由于理想PR现实中无法实现控制器,常用非理想PR替换控制器,不理想PR控制器的传输函数如下所示ωc以积分项的截止频率为准,ωc<
理想PR谐振频率控制器的开环增益是无限的,保证了输入的无静差控制。其他频率的开环增益主要由比例项系数组成Kp决定,不理想PR虽然谐振频率处控制器的振幅值不是无限的,但可以通过增加谐振项系数来增加Kr确保输入的控制精度。
为抑制MMC内部三相环流,在MMC在内部环流数学模型的基础上,采用准PR控制器直接控制换流器内部的三相两倍频率环流,并设计了相应的环流抑制控制器。理论上可以完全消除桥臂电流中的环流量,大大降低桥臂电流的变形成分,使其更接近正弦波。根据上述分析,设计的相应控制器如图4所示。
其中,虚线部分分类PR根据控制器MMC内部环流数学模型PR参数分析,ωc= 5Hz,ω0=2πf=2×100πHz。Kp和kr分别表示控制器中比例积分环节的比例参数和积分参数。附加控制信号加入环流抑制ucri_ref后,控制系统最终输出上、下桥臂电压参考信号upj_ref和Unj_ref,通过相应的调制算法生成全波子模块的脉冲触发,实现换流器的闭环控制。经PSIM软件仿真,ipa、ina、icira及ucira_ref模拟波形如图5所示,说明类PR控制器满足MMC环流抑制要求。
4 结论
该控制策略通过动模试验验证,整个逻辑清晰,大大简化了控制系统,更容易实现数字系统,提高了系统的抗干扰能力,适应了整流和逆变控制系统中的电流控制算法。
参考文献
[1]赵成勇.柔性直流输电建模和仿真技术.北京:2014年中国电力出版社.
ZHAO Chenyong.Modeling andsimulation techniques ofVSC-HVDC system.Beijing: China Power Press, 2014